Page 1 :
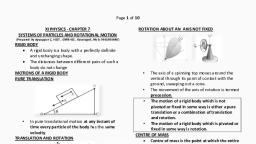
CHAPTER 2, R O TAT I O N A L M O T I O N
Page 2 :
BASIC TYPES OF MOTION, • There are basically four different types of motion namely, translational motion, rotational motion, oscillatory motion, and, random motion.
Page 3 :
TYPES OF MOTION, a) Translational motion, • Translational motion is a motion in which the location of the object, changes with time., • Translational motion can again be classified into two types – rectilinear, motion and curvilinear motion., • In rectilinear motion, the object moves along a straight line., • in curvilinear motion, the object moves along a curved path., • Circular motion is a special type of curvilinear motion in which an object, moves along a circular path., • In translational motion, all objects are considered as point masses., , Examples, , :The motion of elevators in buildings (rectilinear motion), The motion of a basketball into the basket (curvilinear, motion), The motion of satellites around the earth (circular motion).
Page 4 :
TYPES OF MOTION, (b) Rotational motion, • Rotational motion is a motion in which the objects, spin around an axis and the location of the object do, not change with time., • Rotational motion is always associated with rigid, extended bodies. During rotational motion, each, particle constituting the rigid body undergoes circular, motion. Hence circular motion and rotational motion, are closely related., • Example: Motion of blades of the ceiling fan
Page 5 :
TYPES OF MOTION, (c) Oscillatory motion, • Oscillatory motion is the to and fro motion of an object, about a fixed point. It is a special type of periodic motion –, a motion that repeats itself in a regular interval of time., • Example: Oscillations of a pendulum
Page 6 :
TYPES OF MOTION, (d) Random motion, • Random motion is a motion in which the particle moves in a, zig-zag manner and the direction of motion changes, continuously. This kind of motion is unpredictable in, practice., • Example: Motion of honey bee
Page 7 :
CIRCULAR MOTION, • The motion of a body along the circumference of a, circle is called circular motion. In a circular motion,, the direction of motion changes continuously., • When a particle moves uniformly along a circle, the, direction of its velocity changes constantly, but its, magnitude remains constant., • A circular motion is said to be uniform when a, particle moves along a circular path with a constant, speed., • The following parameters are required for the, understanding of circular motion.
Page 8 :
ANGULAR DISPLACEMENT (Θ), • Consider a particle moving along the circumference of a circle of radius r, with centre O. When the body moves from A to B in time t seconds and, covers a distance s, angular displacement, θ is the angle subtended at centre, O., 𝑠, 𝜃 =, 𝑟, • The angle described by a body moving along a circular path in a given time, is known a angular displacement. The SI unit of angular displacement is, radian., • Angular displacement can be expressed in degrees or radians or, revolutions. One revolution corresponds to 360 0or 2π radians., 360°, 1 𝑟𝑎𝑑𝑖𝑎𝑛 =, = 57.30, 𝜋
Page 11 :
LINEAR ACCELERATION (A), • Linear acceleration is the rate of change of linear, velocity of a body moving along a circular path or it, is the change in linear velocity of a body in unit time., If the linear velocity of a body changes from 𝑣2 to 𝑣1, in t seconds,, • Linear acceleration, 𝑎 =, , 𝑣2 −𝑣1, 𝑡, , • The unit of linear acceleration is 𝑚/𝑠 2 .
Page 15 :
PERIOD (T), • The time required to complete one revolution is called, period(T). When one revolution is completed, angular, displacement is of 2π radians. Then angular velocity is given, by, 2𝜋, 𝜔=, 𝑡, 2𝜋, 𝑡=, 𝜔
Page 16 :
CENTRIPETAL ACCELERATION (ac), • The acceleration of a particle moving along a circular path, with uniform speed is always directed towards the centre of, the circle. This acceleration is called centripetal acceleration., • If v is the speed and r the radius of the circle, the centripetal, acceleration is given by, 𝑣2, 𝑎𝑐 =, 𝑟
Page 17 :
CENTRIPETAL FORCE (Fc), • The force which, acting along the radius towards the centre of, the circular path, causes the body to move in a circle with, constant speed is called centripetal force. If 𝑚 is the mass of, the body moving along a circle of radius 𝑟, centripetal force, • 𝐹𝑐 =, , 𝑚𝑣 2, 𝑟
Page 18 :
BANKING OF ROADS, • In a horizontal unbanked curve, the weight of the vehicle is, balanced by the normal reaction whereas the necessary, centripetal force is provided by the friction between the wheels, (tyres) and the surface of the road. If the friction is inadequate,, the vehicle skid off the road. To avoid skidding, the outer edge, of the road is raised above the level of the inner edge at the, curves. This is known as the banking of roads.
Page 19 :
BANKING OF ROADS, • The banking of roads avoids skidding and reduces wear and, tear of the tyres. In a banked road, the horizontal component of, normal reaction will also contribute to centripetal force in, addition to frictional force.
Page 21 :
BANKING OF RAILWAY TRACKS, • When a fast-moving train takes a curved path, it tends to move, away tangentially off the track. To avoid this, the outer rail is, raised above the level of the inner rail. This is known as the, banking of railway tracks. The banking of railway tracks, avoids skidding and reduces the wear and tear of the wheels., • In the case of a curved railway track, the level of the outer rail, is higher than that of the inner one. The height of the outer rail, above the inner rail in the banked rail track is called, superelevation (S). If dis the distance between the rails(the, gauge of the rail) and θ be the angle of superelevation
Page 23 :
ROTATIONAL MOTION OF RIGID, BODIES, • A rigid body is a body that does not change its size or shape, under the action of external forces.
Page 24 :
MOMENT OF INERTIA (ROTATIONAL, INERTIA), • The property of an object to resist any change in its state of, rotational motion is called rotational inertia or moment of, inertia., • When a body is rotating about a fixed axis, the opposition to, its motion depends on the mass and distribution of mass about, the axis of rotation.
Page 25 :
MOMENT OF INERTIA OF A PARTICLE, • The moment of inertia of a particle about a given axis is defined as the, product of the mass of the particle and the square of the distance of the, body from the axis., Consider a particle of mass m capable of rotation about an axis AB. Let r be, the perpendicular distance of the particle from AB., The moment of inertia about the axis AB, I = 𝑚𝑟 2, , The SI unit of moment of inertia is 𝑘𝑔𝑚2 ., The moment of inertia of a body depends on, 1. Mass of the body., 2. The distribution of mass with respect to the axis of rotation.
Page 27 :
RADIUS OF GYRATION(K), The radius of gyration (K) is the distance from the axis of rotation to the point at, which the entire mass of the body is assumed to be concentrated so that the moment of, inertia will be equal to the moment of inertia of the actual body., If M is the total mass of the body and K is the radius of gyration of the body about the, axis of rotation, then the moment of inertia is given by, 𝐼 = 𝑀𝐾 2, 𝐾=, , 𝐼/𝑀, , The SI unit of the radius of gyration is meter. The radius of gyration depends on, 1. The distribution of mass from the axis of rotation., 2. The position and direction of the axis of rotation.
Page 28 :
THEOREMS ON MOMENT OF INERTIA, a) Parallel axes theorem, Parallel axes theorem states that the moment of inertia of, any rigid body about a given axis is equal to the sum of its, moment of inertia about a parallel axis passing through, the centre of gravity and the product of the mass, of the body and the square of the distance between, the axes., Let I be the moment of inertia of a body about an axis AB., Let IG be the moment of inertia about another axis CD, which is parallel to AB and passing through the centre of gravity G of the body. Let M, be the mass and a be the distance between the two axes. Then according to the parallel, axes theorem,, 𝐼 = 𝐼𝐺 + 𝑀𝑎2
Page 29 :
THEOREMS ON MOMENT OF INERTIA, b) Perpendicular axes theorem, Perpendicular axes theorem states that the sum of the moments of inertia of a plane lamina, about two mutually perpendicular axes in its plane is equal to its moment of inertia about a, perpendicular axis passing through the intersection of the first two axes., Let OX and OY be two mutually, perpendicular axes in the plane of the, lamina intersecting each other at point O., The axis OZ is perpendicular to both OX, and OY. If IX, IY, and IZ are the moment, of inertia about the axes OX, OY, and OZ, respectively, then by perpendicular axes, theorem, 𝐼 = 𝐼𝑋 + 𝐼𝑌
Page 30 :
MOMENT OF INERTIA OF CONTINUOUS, MASS DISTRIBUTIONS, Consider a small element of the body of mass 𝑑𝑚 at perpendicular distance 𝑟, from the axis of rotation. The moment of inertia of the element about the, given axis is, 𝑑𝑙 = 𝑟 2 𝑑𝑚, , The moment of inertia of the rigid body, about the given axis is obtained by, integrating the above equation over, appropriate limits to cover the whole, body. Thus,, 𝐼=, , 𝑟 2 𝑑𝑚
Page 31 :
TORQUE(𝜏), Torque is defined as the product of the force and the, perpendicular distance between the line of action of the force, and the axis of rotation., 𝜏 = 𝐹𝑟, The SI unit of torque is newton meter (Nm)., Torque also depends on the angle between the force and the line, joining the point of application of the force and the axis of, rotation. If the angle between 𝑟 and 𝐹 is 𝜃, the perpendicular, distance between the line of action of the force and axis of, rotation becomes 𝑠𝑖𝑛𝜃. Therefore,, 𝜏 = 𝐹𝑟 sin 𝜃
Page 33 :
ANGULAR MOMENTUM (L), The angular momentum of a rotating body is the product of the, moment of inertia about the axis of rotation and the angular, velocity., 𝐿 = 𝐼𝜔, • The angular momentum of a rotating body plays the same role, as the momentum in linear motion. The SI unit of angular, momentum is 𝐽𝑠 or 𝑘𝑔 𝑚2 𝑠 −1
Page 34 :
CONSERVATION OF ANGULAR, MOMENTUM, • The principle of conservation of angular momentum states, that, if no external torque acts on a system, the total angular, momentum of the system remains constant., • The angular momentum of the system will be conserved if the, net external torque on the system is zero. If 𝐼 be the moment of, inertia of a body about a given axis of rotation and 𝜔 be its, angular velocity, then 𝐿 = 𝐼 𝜔 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡.