Page 1 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , Content, Governors: Function of governor, Inertia and centrifugal type of governors, Controlling, force analysis, Governor Effort and governor power, Sensitivity, stability, Isochronism’s, and Hunting, Friction in sensitiveness., Flywheel: Turning moment diagram, Fluctuation of energy and speed, Determination of, flywheel size for different types of prime movers and machines., , 4.1 Introduction, The function of a governor is to regulate the mean speed of an engine, when there are, variations in the load e.g. When the load on an engine increases, its speed decreases,, Therefore it becomes necessary to increase the supply of working fluid. On the other, hand, when the load on the engine decreases, its speed increases and thus less working, fluid is required. The governor automatically controls the supply of working fluid to the, engine with the varying load conditions and keeps the mean speed within certain limits., A little consideration will show that when the load increases, the configuration of the, governor changes and a valve is moved to increase the supply of the working fluid;, conversely, when the load decreases, the engine speed in-creases and the governor, decreases the supply of working fluid., , 4.2 Types of Governors, The governors may, broadly, be classified as, 1. Centrifugal governors, and 2. Inertia governors, The centrifugal governors may further be classified as follows:, , 1. Centrifugal governors, The centrifugal governors are based on the balancing of centrifugal force on the, rotating balls by an equal and opposite radial force, known as the controlling force*.It, consists of two balls of equal mass, which are attached to the arms as shown in Fig. 4.1., Prof. Sachin M. Shinde, KECSP, , Page 1
Page 2 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , Fig. 4.1 Centrifugal governor, These balls are known as governor balls or fly balls. The balls revolve with a, spindle, which is driven by the engine through bevel gears. The upper ends of the arms, are pivoted to the spindle, so that the balls may rise up or fall down as they revolve, about the vertical axis. The arms are connected by the links to a sleeve, which is keyed, to the spindle. This sleeve revolves with the spindle; but can slide up and down. The, balls and the sleeve rise when the spindle speed increases, and falls when the speed, decreases. In order to limit the travel of the sleeve in upward and down-ward directions,, two stops S, S are provided on the spindle. The sleeve is connected by a bell crank lever, to a throttle valve. The supply of the working fluid de-creases when the sleeve rises and, increases when it falls., When the load on the engine increases, the engine and the governor speed, decreases. This results in the decrease of centrifugal force on the balls. Hence the balls, move inwards and the sleeve moves down-wards. The downward movement of the, sleeve operates a throttle valve at the other end of the bell crank lever to increase the, supply of working fluid and thus the engine speed is increased. In this case, the extra, power output is provided to balance the increased load. When the load on the engine, decreases, the engine and the governor speed increases, which results in the increase of, Prof. Sachin M. Shinde, KECSP, , Page 2
Page 3 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , centrifugal force on the balls. Thus the balls move outwards and the sleeve rises, upwards. This up-ward movement of the sleeve reduces the supply of the working fluid, and hence the speed is decreased. In this case, the power output is reduced., Terms Used in Governors, The following terms used in governors are important from the subject point of view ;, 1. Height of a governor. It is the vertical distance from the centre of the ball to a point, where the axes of the arms (or arms produced) intersection the spindle axis. It is usually, denoted by h., 2. Equilibrium speed. It is the speed at which the governor balls, arms etc., are in, complete equilibrium and the sleeve does not tend to move upwards or downwards., 3. Mean equilibrium speed. It is the speed at the mean position of the balls or the, sleeve., 4. Maximum and minimum equilibrium speeds. The speeds at the maximum and, minimum radius of rotation of the balls, without tending to move either way are known, as maximum and mini-mum equilibrium speeds respectively., Note: There can be many equilibrium speeds between the mean and the maximum and, the mean and the mini-mum equilibrium speeds., 5. Sleeve lift. It is the vertical distance which the sleeve travels due to change in, equilibrium speed., There are three commonly used loaded controlled centrifugal governors:, (a) Watt governor, (b) Porter governor, (c) Proell governor, Watt governor does not carry dead weight at the sleeve. Porter governor and, proell governor have heavy dead weight at the sleeve. In porter governor balls are placed, at the junction of upper and lower arms. In case of proell governor the balls are placed at, the extension of lower arms. The sensitiveness of watt governor is poor at high speed, and this limits its field of application. Porter governor is more sensitive than watt, governor. The proell governor is most sensitive out of these three., (a)Watt Governor, This governor was used by James Watt in his steam engine. The spindle is driven by the, output shaft of the prime mover. The balls are mounted at the junction of the two arms., The upper arms are connected to the spindle and lower arms are connected to the sleeve, , Prof. Sachin M. Shinde, KECSP, , Page 3
Page 4 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , as shown in Figure 4.2(a). The arms of the governor may be connected to the spindle in, the following three ways:, 1. The pivot P may be on the spindle axis as shown in Fig. 4.2 (a)., 2. The pivot P may be offset from the spindle axis and the arms when produced intersect, at O, as shown in Fig. 4.2 (b)., 3. The pivot P may be offset, but the arms cross the axis at O, as shown in Fig. 4.2 (c)., , Fig. 4.2 Watt governor, Let m = Mass of the ball in kg,, w = Weight of the ball in newton’s = m.g,, T = Tension in the arm in newton’s,, ω = Angular velocity of the arm and ball about the spindle axis in rad/s,, r = Radius of the path of rotation of the ball i.e. horizontal distance from the centre of, the ball to the spindle axis in meters,, FC = Centrifugal force acting on the ball in newton’s = m.ω2.r, and, h = Height of the governor in meters., It is assumed that the weight of the arms, links and the sleeve are negligible as compared, to the weight of the balls. Now, the ball is in equilibrium under the action of, 1. The centrifugal force (FC) acting on the ball, 2. The tension (T) in the arm, and 3. the, weight (w) of the ball., Taking moments about point O, we have, FC × h = w × r = m.g.r, or m.ω2.r.h = m.g.r or h = g /ω2 . . ………………………………….. (i), When g is expressed in m/s2 and ω in rad/s, then h is in meters. If N is the speed in, r.p.m., then, ω =2 π N/60, Prof. Sachin M. Shinde, KECSP, , Page 4
Page 5 :
Unit 4: Governor and Flywheel, , (, , ), , T.Y.BTech (Mech), , meters. ………………….. . (∵ g = 9.81 m/s2) . . . (ii), , Note: We see from the above expression that the height of a governor h is inversely, proportional to N .Therefore at high speeds; the value of h is small. At such speeds, the, change in the value of h corresponding to a small change in speed is insufficient to, enable a governor of this type to operate the mechanism to give the necessary change in, the fuel supply. This governor may only work satisfactorily at relatively low speeds i.e., from 60 to 80 r.p.m., (b) Porter Governor, The Porter governor is a modification of a Watt’s governor, with central load attached to, the sleeve as shown in Fig. 4.3 (a). The load moves up and down the central spindle., This additional downward force increases the speed of revolution required to enable the, balls to rise to any pre-determined level. Consider the forces acting on one-half of the, governor as shown in Fig. 4.3 (b)., , Fig. 4.3 Porter governor., Let, m = Mass of each ball in kg,, w = Weight of each ball in N,, M = Mass of the central load in kg,, W = Weight of the central load in N,, Prof. Sachin M. Shinde, KECSP, , Page 5
Page 6 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , r = Radius of rotation in m,, h = Height of governor in m,, N = Speed of the balls in rpm., ω = Angular speed of the balls (2, , N/60) rad/s,, , FC = Centrifugal force acting on the ball N,, T1 = Force in the arm in N,, T2 = Force in the link in N,, α= Angle of inclination of the arm (or upper link) to the vertical, and, β = Angle of inclination of the link (or lower link) to the vertical., Though there are several ways of determining the relation between the height of the, governor (h) and the angular speed of the balls (ω), yet the following two methods are, important from the subject point of view:, Method of resolution of forces, Considering the equilibrium of the forces acting at D, we have, T2, , =, , =, , Or T2 =, , …………………………………………………………………..(i), , Again, considering the equilibrium of the forces acting on B. The point B is in, equilibrium under the action of the following forces, as shown in Fig. 4.3 (b)., (i) The weight of ball (w = m.g),, (ii) The centrifugal force (FC),, (iii) The tension in the arm (T1), and, (iv) The tension in the link (T2)., Resolving the forces vertically,, T1, , = T2, , +w=, , + mg………………………………………………….(ii), , Resolving the forces horizontally,, T1, , + T2, , T1, , +, , T1, , = Fc -, , = Fc, = Fc, …………………………………………………..(iii), , Dividing equation (iii) by equation (ii),, , Prof. Sachin M. Shinde, KECSP, , Page 6
Page 7 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , ………………………………………….(iv), , …………………………………………………… (v), Notes : 1. When the length of arms are equal to the length of links and the points P and, D lie on the same vertical line, then, tan α = tan β, , or q = tan α / tan β = 1, , Therefore, the equation (v) becomes, , ………………………………………….(vi), 2. When the loaded sleeve moves up and down the spindle, the frictional force acts on it, in a direction opposite to that of the motion of sleeve., If F = Frictional force acting on the sleeve in newton’s, then the equations (v) and (vi), may be written as, , Prof. Sachin M. Shinde, KECSP, , Page 7
Page 8 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , The + sign is used when the sleeve moves upwards or the governor speed increases and, negative sign is used when the sleeve moves downwards or the governor speed, decreases., (c) Proell Governor, The Proell governor has the balls fixed at B and C to the extension of the links DF and, EG, as shown in Fig. 4.4 (a). The arms FP and GQ are pivoted at P and Q respectively., Consider the equilibrium of the forces on one-half of the governor as shown in Fig. 4.4, (b).The instantaneous centre (I) lies on the intersection of the line PF produced and the, line from D drawn perpendicular to the spindle axis. The perpendicular BM is drawn on, ID., , Fig. 4.4 Proell governor, Taking moments about I, using the same notations as discussed in Art. 18.6 (Porter, governor),, , Multiplying and dividing by FM, we have, , Prof. Sachin M. Shinde, KECSP, , Page 8
Page 9 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , Notes : 1. The equation (i) may be applied to any given configuration of the governor., 2. Comparing equation (iii) with the equation (v) of the Porter governor (Art. b), we see, that the equilibrium speed reduces for the given values of m, M and h. Hence in order to, have the same equilibrium speed for the given values of m, M and h, balls of smaller, masses are used in the proell governor than in the Porter governor., 3. When α = β, then q = 1. Therefore equation (iii) may be written as, , (d) Hartnell Governor, A Hartnell governor is a spring loaded governor as shown in Fig. 4.5. It consists of two, bell crank levers pivoted at the points O,O to the frame. The frame is attached to the, governor spindle and therefore rotates with it. Each lever carries a ball at the end of the, vertical arm OB and a roller at the end of the horizontal arm OR. A helical spring in, compression provides equal downward forces on the two rollers through a collar on the, sleeve. The spring force may be adjusted by screwing a nut up or down on the sleeve., Let m = Mass of each ball in kg,, M = Mass of sleeve in kg,, r1 = Minimum radius of rotation in meters,, , Prof. Sachin M. Shinde, KECSP, , Page 9
Page 10 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , r2 = Maximum radius of rotation in meters,, ω1 = Angular speed of the governor at minimum radius in rad/s,, ω2 = Angular speed of the governor at maximum radius in rad/s,, S1 = spring force exerted on the sleeve at ω1 in newton’s,, S2 = spring force exerted on the sleeve at ω2 in newton’s,, FC1 = Centrifugal force at ω1 in newton’s = m (ω1)2 r1,, FC2 = Centrifugal force at ω2 in newton’s = m (ω2)2 r2,, s = Stiffness of the spring or the force required to compress the spring by one mm,, x = Length of the vertical or ball arm of the lever in meters,, y = Length of the horizontal or sleeve arm of the lever in meters, and, r = Distance of fulcrum O from the governor axis or the radius of rotation when the, governor is in mid-position, in meters., , Fig.4.5 Hartnell governor, , Fig. 4.6, Prof. Sachin M. Shinde, KECSP, , Page 10
Page 11 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , Consider the forces acting at one bell crank lever. The minimum and maximum position, is shown in Fig. 4.6. Let h be the compression of the spring when the radius of rotation, changes from r1 to r2., For the minimum position i.e. when the radius of rotation changes from r to r1, as shown, in Fig. 4.6 (a), the compression of the spring or the lift of sleeve h1 is given by, , Similarly, for the maximum position i.e. when the radius of rotation changes from r to r2,, as shown in Fig. 4.6 (b), the compression of the spring or lift of sleeve h2 is given by, , Adding equations (i) and (ii),, , Now for minimum position, taking moments about point O, we get, , Again for maximum position, taking moments about point O, we get, , Subtracting equation (iv) from equation (v),, , We know that, , Prof. Sachin M. Shinde, KECSP, , Page 11
Page 12 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , Neglecting the obliquity effect of the arms (i.e. x1 = x2 = x, and y1 = y2 = y) and the, moment due to weight of the balls (i.e. m.g), we have for minimum position,, , Similarly for maximum position,, , Subtracting equation (vi) from equation (vii),, , We know that, , Notes: 1. unless otherwise stated, the obliquity effect of the arms and the moment due to, the weight of the balls is neglected, in actual practice., 2. When friction is taken into account, the weight of the sleeve (M.g) may be replaced, by (M.g. ± F)., 3. The centrifugal force (FC) for any intermediate position (i.e. between the minimum, and maximum position) at a radius of rotation (r) may be obtained as discussed below :, Since the stiffness for a given spring is constant for all positions, therefore for minimum, and intermediate position,, , and for intermediate and maximum position,, , ∴, , From equations (ix), (x) and (xi),, , Prof. Sachin M. Shinde, KECSP, , Page 12
Page 13 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , (e) Hartung Governor, A spring controlled governor of the Hartung type is shown in Fig 4.7. (a). In this type of, governor, the vertical arms of the bell crank levers are fitted with spring balls which, compress against the frame of the governor when the rollers at the horizontal arm press, against the sleeve., , Fig. 4.7 Hartung governor, Let S = spring force,, FC = Centrifugal force,, M = Mass on the sleeve, and, x and y = Lengths of the vertical and horizontal arm of the bell crank lever respectively., Fig. 4.7 (a) and (b) show the governor in mid-position. Neglecting the effect of obliquity, of the arms, taking moments about the fulcrum O,, , (f) Wilson-Hartnell Governor, , Fig. 4.8, , Fig. 4.9, , A Wilson-Hartnell governor is a governor in which the balls are connected by a spring in, tension as shown in Fig. 4.8. An auxiliary spring is attached to the sleeve mechanism, Prof. Sachin M. Shinde, KECSP, , Page 13
Page 14 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , through a lever by means of which the equilibrium speed for a given radius may be, adjusted. The main spring may be considered of two equal parts each belonging to both, the balls. The line diagram of a Wilson- Hartnell governor is shown in Fig. 4.9., Let P = Tension in the main spring or ball spring A,, S = Tension in the auxiliary spring B,, m = Mass of each ball,, M = Mass of sleeve,, sb = Stiffness of each ball spring,, sa = Stiffness of auxiliary spring,, FC = Centrifugal force of each ball, and, r = Radius of rotation of balls,, Now total downward force on the sleeve, , Taking moments about O and neglecting the effect of the pull of gravity on the ball,, , Let suffixes 1 and 2 are used to denote the values at minimum and maximum, equilibrium Speeds respectively., ∴ At minimum equilibrium speed,, , and at maximum equilibrium speed,, , Subtracting equation (i) from equation (ii), we have, , When the radius increases from r1 to r2, the ball springs extend by the amount 2 (r2 – r1), and auxiliary spring extend by the amount, , Substituting the values of (P2 – P1) and (S2 – S1) in equation (iii),, , Prof. Sachin M. Shinde, KECSP, , Page 14
Page 15 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , (g) Pickering Governor, A Pickering governor is mostly used for driving gramophone. It consists of *three, straight leaf springs arranged at equal angular intervals round the spindle. Each spring, carries a weight at the centre. The weights move outwards and the springs bend as they, rotate about the spindle axis with increasing speed., , Fig 4.10, In Fig. 4.10 (a), the governor is at rest. When the governor rotates, the springs together, with the weights are deflected as shown in Fig. 4.10 (b). The upper end of the spring is, attached by a screw to hexagonal nut fixed to the governor spindle. The lower end of the, spring is attached to a sleeve which is free to slide on the spindle. The spindle runs in a, bearing at each end and is driven through gearing by the motor. The sleeve can rise until, it reaches a stop, whose position is adjustable., Let, , m = Mass attached at the centre of the leaf spring,, a = Distance from the spindle axis to the centre of gravity of the mass,, When the governor is at rest,, , Prof. Sachin M. Shinde, KECSP, , Page 15
Page 16 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , ω = Angular speed of the governor spindle,, δ = Deflection of the centre of the leaf spring at angular speed ω,, a + δ = Distance from the spindle axis to the centre of gravity of the, mass, when the governor is rotating, and, λ = Lift of the sleeve corresponding to the deflection δ., We know that the maximum deflection of a leaf spring with both ends fixed and carrying, a load (W) at the centre is,, …………………. (i), where l = Distance between the fixed ends of the spring,, E = Young’s modulus of the material of the spring, and, I = Moment of inertia of its cross-section about the neutral axis, (where b and t are width and thickness of spring)., , In case of a Pickering governor, the central load is the centrifugal force., , Substituting the value of W in equation (i), we have, , 2. Inertia governor, , Figure 4.11 Inertia governor, , Prof. Sachin M. Shinde, KECSP, , Page 16
Page 17 :
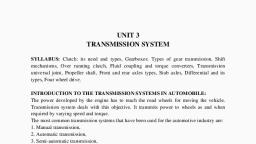
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , Construction:Inertia is the property of matter by which it continues in its existing state of rest or, uniform motion unless the state is changed by the external force. This property of matter, is used by the balls of inertia governor in its operation. The two balls of the inertia, governor are kept over a disc. These two balls are connected to each other by an arm., This arm connecting the two balls is pivoted and operates the throttle valve. The opening, and closing of throttle valve is responsible for increase and decrease in fuel supply., Similar to spring loaded centrifugal governors, a spring is available on this governor to, control the movement of the balls., Working:When the disc of the inertia governor rotates and when the speed of disc is increased or, when the rotation of disc is accelerated, the balls moves in the opposite direction to the, rotation of the disc. The movement of this ball in opposite direction is controlled by the, spring available in the governor. As the balls moves in opposite direction, the arm, connecting the balls also move. This arm operates the valve. So when movement of balls, increases in opposite direction, the throttle valve closes and supply of fuel is reduced., Similarly, when the speed of disc is decreased or the rotation of disc is retarded, the balls, starts coming back to its original position. So the arm also moves and the throttle valve, which is operated by the arm starts opening. Hence, the supply of fuel increases., Advantages:1) Highly sensitive to increase or decrease in load., 2) Quick response to change in load., Disadvantages:1) Difficult to completely balance the revolving parts., , 4.3 Controlling Force, , Fig. 4.12 Controlling force diagram., Prof. Sachin M. Shinde, KECSP, , Page 17
Page 18 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , We have seen earlier that when a body rotates in a circular path, there is an, inward radial force or centripetal force acting on it. In case of a governor running at a, steady speed, the inward force acting on the rotating balls is known as controlling force., It is equal and opposite to the centrifugal reaction., ∴ Controlling force, FC = m.ω2.r, The controlling force is provided by the weight of the sleeve and balls as in Porter, governor and by the spring and weight as in Hartnell governor (or spring controlled, governor).When the graph between the controlling force (FC) as ordinate and radius of, rotation of the balls (r) as abscissa is drawn, then the graph obtained is known as, controlling force diagram. This diagram enables the stability and sensitiveness of the, governor to be examined and also shows clearly the effect of friction, 4.3.1 Controlling Force Diagram for Porter Governor, The controlling force diagram for a Porter governor is a curve as shown in Fig. 4.12 We, Know that controlling force,, , where υ is the angle between the axis of radius of rotation and a line joining a given, point (say A) on the curve to the origin O., Notes : 1. In case the governor satisfies the condition for stability, the angle υ must, increase with radius of rotation of the governor balls. In other words, the equilibrium, speed must increase with the increase of radius of rotation of the governor balls., 2. For the governor to be more sensitive, the change in the value of υ over the change of, radius of rotation should be as small as possible., 3. For the isochronous governor, the controlling force curve is a straight line passing, through the origin. The angle υ will be constant for all values of the radius of rotation of, the governor. From equation (i), , Where, , Prof. Sachin M. Shinde, KECSP, , Page 18
Page 19 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , Using the above relation, the angle υ may be determined for different values of N and, the lines are drawn from the origin*. These lines enable the equilibrium speed, corresponding to a given radius of rotation to be determined. Alternatively, the same, results may be obtained more simply by setting-off a speed scale along any arbitrarily, Chosen ordinate. The controlling force is calculated for one constant radius of rotation, and for different arbitrarily chosen values of speed. The values thus obtained are set-off, along the ordinate that corresponds to the chosen radius and marked with the appropriate, speeds., 4.3.2 Controlling Force Diagram for Spring-controlled Governors, , Fig. 4.13, The controlling force diagram for the spring controlled governors is a straight line, as, shown in Fig. 4.9. We know that controlling force,, FC = m.ω2.r or FC /r = m.ω2, The following points, for the stability of spring-controlled governors, may be noted:, 1. For the governor to be stable, the controlling force (FC) must increase as the radius of, rotation (r) increases, i.e. FC / r must increase as r increases. Hence the controlling force, line AB when produced must intersect the controlling force axis below the origin, as, shown in Fig. 4.13. The relation between the controlling force (FC) and the radius of, rotation (r) for the stability of spring controlled governors is given by the following, equation, FC = a.r – b . . . (i), Where a and b are constants., 2. The value of b in equation (i) may be made either zero or positive by increasing the, initial tension of the spring. If b is zero, the controlling force line CD passes through the, , Prof. Sachin M. Shinde, KECSP, , Page 19
Page 20 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , origin and the governor becomes isochronous because F /r will remain constant for all, radii of rotation. The relation between the controlling force and the radius of rotation, for, an isochronous governor is, therefore,, FC = a.r . . . (ii), 3. If b is greater than zero or positive, then FC /r decreases as r, , increases, so that the, , equilibrium speed of the governor decreases with an increase of the radius of rotation of, balls, which is impracticable. Such a governor is said to be unstable and the relation, between the controlling force and the radius of rotation is, therefore, FC = a.r + b . . . (iii), , 4.4 Effort and Power of a Governor, The effort of a governor is the mean force exerted at the sleeve for a given percentage, change of speed* (or lift of the sleeve). It may be noted that when the governor is, running steadily, there is no force at the sleeve. But, when the speed changes, there is a, resistance at the sleeve which opposes its motion. It is assumed that this resistance which, is equal to the effort varies uniformly from a maximum value to zero while the governor, moves into its new position of equilibrium. The power of a governor is the work done at, the sleeve for a given percentage change of speed. It is the product of the mean value of, the effort and the distance through which the sleeve moves. Mathematically,, Power = Mean effort × lift of sleeve, 4.4.1 Effort and Power of a Porter Governor, The effort and power of a Porter governor may be determined as discussed below., Let N = Equilibrium speed corresponding to the configuration as shown in Fig. 4.14 (a),, and c = Percentage increase in speed., ∴ Increase in speed = c.N, and increased speed = N + c.N = N (1 + c), The equilibrium position of the governor at the increased speed is shown in Fig. 4.14, (b)., , Fig. 4.14, Prof. Sachin M. Shinde, KECSP, , Page 20
Page 21 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , We have discussed in Art. b that when the speed is N r.p.m., the sleeve load is M.g., Assuming that the angles α and β are equal, so that q = 1, then the height of the, governor,, , When the increase of speed takes place, a downward force P will have to be exerted on, the sleeve in order to prevent the sleeve from rising. If the speed increases to (1 + c) N, r.p.m. and the height of the governor remains the same, the load on the sleeve increases, to M1.g. Therefore, , Equating equations (i) and (ii), we have, , A little consideration will show that (M1 – M) g is the downward force which must be, applied in order to prevent the sleeve from rising as the speed increases. It is the same, force which acts on the governor sleeve immediately after the increase of speed has, taken place and before the sleeve begins to move. When the sleeve takes the new, position as shown in Fig. 4.10 (b), this force gradually diminishes to zero., Let P = Mean force exerted on the sleeve during the increase in speed or the effort of, the governor., , . . . (Neglecting c2, being very small), If F is the frictional force (in newton’s) at the sleeve, then, P = c (m.g + M.g ± F), We have already discussed that the power of a governor is the product of the governor, effort and the lift of the sleeve., Let x = Lift of the sleeve., ∴ Governor Power = P × x . . . (v), If the height of the governor at speed N is h and at an increased speed (1 + c) N is h1,, then, Prof. Sachin M. Shinde, KECSP, , Page 21
Page 22 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , x =2 (h – h1), As there is no resultant force at the sleeve in the two equilibrium positions, therefore, , . . . (Neglecting c2, being very small), Substituting the values of P and x in equation (v), we have, , Notes: 1. If α is not equal to β, i.e. tan β / tan α = q, then the equations (i) and (ii) may be, written as, , When speed increases to (1 + c) N and height of the governor remains the same, then, , From equations (viii) and (ix), we have, , Prof. Sachin M. Shinde, KECSP, , Page 22
Page 23 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , 4.5 Sensitivity, Consider two governors A and B running at the same speed. When this speed increases, or decreases by a certain amount the lift of the sleeve of governor A is greater than the, lift of the sleeve of governor B. It is then said that the governor A is more sensitive than, the governor B., In general, the greater the lift of the sleeve corresponding to a given fractional change in, speed, the greater is the sensitiveness of the governor. It may also be stated in another, way that for a given lift of the sleeve, the sensitiveness of the governor increases as the, speed range decreases. This definition of sensitiveness may be quite satisfactory when, the governor is considered as an independent mechanism. But when the governor is, fitted to an engine, the practical requirement is simply that the change of equilibrium, speed from the full load to the no load position of the sleeve should be as small a, fraction as possible of the mean equilibrium speed. The actual displacement of the, sleeve is immaterial, provided that it is sufficient to change the energy supplied to the, engine by the required amount. For this reason, the sensitiveness is defined as the ratio, of the difference between the maximum and minimum equilibrium speeds to the mean, equilibrium speed., Let N1 = Minimum equilibrium speed,, N2 = Maximum equilibrium speed, and, N = Mean equilibrium speed= (N1 + N2) / 2, ∴, , Sensitiveness of the governor =, , Prof. Sachin M. Shinde, KECSP, , Page 23
Page 24 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , 4.6 Stability of Governors, A governor is said to be stable when for every speed within the working range, there is a definite configuration i.e. there is only one radius of rotation of the governor, balls at which the governor is in equilibrium. For a stable governor, if the equilibrium, speed increases, the radius of governor balls must also increase., Note: A governor is said to be unstable, if the radius of rotation decreases as the speed, increases., , 4.8 Isochronous Governors, A governor is said to be isochronous when the equilibrium speed is constant (i.e. range, of speed is zero) for all radii of rotation of the balls within the working range, neglecting, friction. The isochronism is the stage of infinite sensitivity. Let us consider the case of a, Porter governor running at speeds N1 and N2 r.p.m. We have discussed in Art. b that, , For isochronism, range of speed should be zero i.e. N2 – N1 = 0 or N2 = N1. Therefore, from equations (i) and (ii), h1 = h2, which is impossible in case of a Porter governor., Hence a Porter governor cannot be isochronous., Now consider the case of a Hartnell governor running at speeds N1 and N2 r.p.m. We, have discussed in Art. c that, , For isochronism, N2 = N1 . Therefore from equations (iii) and (iv),, , Prof. Sachin M. Shinde, KECSP, , Page 24
Page 25 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , Note : The isochronous governor is not of practical use because the sleeve will move to, one of its extreme positions immediately the speed deviates from the isochronous speed., , 4.9 Hunting, A governor is said to be hunt if the speed of the engine fluctuates continuously above, and below the mean speed. This is caused by a too sensitive governor which changes the, fuel supply by a large amount when a small change in the speed of rotation takes place., For example, when the load on the engine increases, the engine speed decreases and, if, the governor is very sensitive, the governor sleeve immediately falls to its lowest, position. This will result in the opening of the control valve wide which will supply the, fuel to the engine in excess of its requirement so that the engine speed rapidly increases, again and the governor sleeve rises to its highest position. Due to this movement of the, sleeve, the control valve will cut off the fuel supply to the engine and thus the engine, speed begins to fall once again. This cycle is repeated indefinitely. Such a governor may, admit either the maximum or the minimum amount of fuel. The effect of this will be to, cause wide fluctuations in the engine speed or in other words, the engine will hunt., , 4.10 Insensitiveness in the governors, The friction force at the sleeve gives rise to the insensitiveness in the governor., At any given radius there will be two different speeds one being when sleeve moves up, and other when sleeve moves down. Figure 4.15 shows the controlling force diagram for, such a governor., , Figure 4.15 Insensitiveness in the Governors, The corresponding three values of speeds for the same radius OA are :, (a) The speed N when there is no friction., (b) The speed N’ when speed is increasing or sleeve is on the verge of moving up, and, , Prof. Sachin M. Shinde, KECSP, , Page 25
Page 26 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , (c) The speed N” when speed is decreasing or sleeve on the verge of moving down., This means that, when radius is OA, the speed of rotation may vary between the limits, N” and N’, without causing any displacement of the governor sleeve. The governor is, said to be insensitive over this range of speed. Therefore,, their fore , Coefficient of insensitiveness, , 4.11 Flywheel, A flywheel used in machines serves as a reservoir, which stores energy during the period, When the supply of energy is more than the requirement, and releases it during the, period when the requirement of energy is more than the supply., In case of steam engines, internal combustion engines, reciprocating compressors and, pumps, the energy is developed during one stroke and the engine is to run for the whole, cycle on the energy produced during this one stroke. For example, in internal, combustion engines, the energy is developed only during expansion or power stroke, which is much more than the engine load and no energy is being developed during, suction, compression and exhaust strokes in case of four stroke engines and during, compression in case of two stroke engines. The excess energy developed during power, stroke is absorbed by the flywheel and releases it to the crankshaft during other strokes, in which no energy is developed, thus rotating the crankshaft at a uniform speed. A little, consideration will show that when the flywheel absorbs energy, its speed increases and, when it releases energy, the speed decreases. Hence a flywheel does not maintain a, constant speed; it simply reduces the fluctuation of speed. In other words, a flywheel, controls the speed variations caused by the fluctuation of the engine turning moment, during each cycle of operation., 4.12 Turning moment diagram, The turning moment diagram (also known as crank-effort diagram) is the graphical, representation of the turning moment or crank-effort for various positions of the crank. It, is plotted on Cartesian co-ordinates, in which the turning moment is taken as the, ordinate and crank angle as abscissa, 4.12.1 Turning moment diagram cylinder double acting steam engine, A turning moment diagram for a single cylinder double acting steam engine is shown in, Fig. 4.16. The vertical ordinate represents the turning moment and the horizontal, ordinate represents the crank angle., Prof. Sachin M. Shinde, KECSP, , Page 26
Page 27 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , We have known that the turning moment on the crankshaft,, , From the above expression, we see that the turning moment (T ) is zero, when the, crank angle (θ) is zero. It is maximum when the crank angle is 90° and it is again zero, when crank angle is 180°., , Fig. 4.16 Turning moment diagram for a single cylinder, double acting steam, engine, where, , FP = Piston effort,, , r = Radius of crank,, n = Ratio of the connecting rod length and radius of crank, and, θ = Angle turned by the crank from inner dead centre., This is shown by the curve abc in Fig. 4.16 and it represents the turning moment, diagram for outstroke. The curve cde is the turning moment diagram for in stroke and is, somewhat similar to the curve abc. Since the work done is the product of the turning, moment and the angle turned, therefore the area of the turning moment diagram, represents the work done per revolution. In actual practice, the engine is assumed to, work against the mean resisting torque, as shown by a horizontal line AF. The height of, the ordinate aA represents the mean height of the turning moment diagram. Since it is, assumed that the work done byte turning moment per revolution is equal to the work, done against the mean resisting torque, therefore the area of the rectangle aAFe is, proportional to the work done against the mean resisting torque., Notes: 1. When the turning moment is positive (i.e. when the engine torque is more than, the mean resisting torque) as shown between points B and C (or D and E) in Fig. 16.1,, the crankshaft accelerates and the work is done by the steam., , Prof. Sachin M. Shinde, KECSP, , Page 27
Page 28 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , 2. When the turning moment is negative (i.e. when the engine torque is less than the, mean resisting torque) as shown between points C and D in Fig. 16.1, the crankshaft, retards and the work is done on the steam., 3. If, , T = Torque on the crankshaft at any instant, and, , Tmean = Mean resisting torque., Then accelerating torque on the rotating parts of the engine = T – Tmean, 4. If (T – Tmean) is positive, the flywheel accelerates and if (T – Tmean ) is negative, then, the flywheel retards., 4.12.2 Turning moment diagram for a four stroke cycle internal combustion engine, A turning moment diagram for a four stroke cycle internal combustion engine is shown, in Fig. 4.17. We know that in a four stroke cycle internal combustion engine, there is, one working stroke after the crank has turned through two revolutions, i.e. 720° (or 4 π, radians)., , Fig. 4.17 Turning moment diagram for a four stroke cycle internal combustion, engine., Since the pressure inside the engine cylinder is less than the atmospheric, pressure during the suction stroke, therefore a negative loop is formed as shown in Fig., 4.13.During the compression stroke, the work is done on the gases, therefore a higher, negative loop is obtained. During the expansion or working stroke, the fuel burns and, the gases expand; therefore a large positive loop is obtained. In this stroke, the work is, done by the gases. During exhaust stroke, the work is done on the gases; therefore a, negative loop is formed. It may be noted that the effect of the inertia forces on, the piston is taken into account in Fig. 4.13., Prof. Sachin M. Shinde, KECSP, , Page 28
Page 29 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , 4.12.3. Turning Moment Diagram for a Multi-cylinder Engine, A separate turning moment diagram for a compound steam engine having three, cylinders and the resultant turning moment diagram is shown in Fig. 4.18. The resultant, turning moment diagram is the sum of the turning moment diagrams for the three, cylinders. It may be noted that the first cylinder is the high pressure cylinder, second, cylinder is the intermediate cylinder and the third cylinder is the low pressure cylinder., The cranks, in case of three cylinders, are usually placed at120° to each other., , Fig. 4.18 turning moment diagram for a multi-cylinder engine, 4.13 Fluctuation of Energy, The fluctuation of energy may be determined by the turning moment diagram for one, complete cycle of operation. Consider the turning moment diagram for a single cylinder, double acting steam engine as shown in Fig. 4.16. We see that the mean resisting torque, line AF cuts the turning moment diagram at points B, C, D and E. When the crank, moves from a to p, the work done by the engine is equal to the area aBp, whereas the, energy required is represented by the area aABp. In other words, the engine has done, less work (equal to the area a AB) than the requirement. This amount of energy is taken, from the flywheel and hence the speed of the flywheel decreases. Now the crank moves, from p to q, the work done by the engine is equal to the area pBbCq, whereas the, requirement of energy is represented by the area pBCq. Therefore, the engine has done, more work than the requirement. This excess work (equal to the area BbC) is stored in, the flywheel and hence the speed of the flywheel increases while the crank moves from, p to q. Similarly, when the crank moves from q to r, more work is taken from the engine, than is developed. This loss of work is represented by the area CcD. To supply this loss,, , Prof. Sachin M. Shinde, KECSP, , Page 29
Page 30 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , the flywheel gives up some of its energy and thus the speed decrease while the crank, moves from q to r. As the crank moves from r to s, excess energy is again developed, given by the area DdE and the speed again increases. As the piston moves from s to e,, again there is a loss of work and the speed decreases. The variations of energy above and, below the mean resisting torque line are called, , fluctuations of energy. The areas BbC,, , CcD, DdE, etc. represent fluctuations of energy. A little consideration will show that the, engine has a maximum speed either at q or at s. This is due to the fact that the flywheel, absorbs energy while the crank moves from p to q and from r to s. On the other hand, the, engine has a minimum speed either at p or at r. The reason is that the flywheel gives out, some of its energy when the crank moves from a to p and q to r. The difference between, the maximum and the minimum energies is known as maximum fluctuation of energy., 4.13.1 Determination of Maximum Fluctuation of Energy, , Fig. 4.19 Determination of maximum fluctuation of energy., A turning moment diagram for a multi-cylinder engine is shown by a wavy curve in Fig., 4.19. The horizontal line AG represents the mean torque line. Let a1, a3, a5 be the areas, above the mean torque line and a2, a4 and a6 be the areas below the mean torque line., These areas represent some quantity of energy which is either added or subtracted from, the energy of the moving parts of the engine., Let the energy in the flywheel at A = E,, then from Fig. 4.15, we have, Energy at B = E + a1, Energy at C = E + a1– a2, Energy at D = E + a1 – a2 + a3, Energy at E = E + a1 – a2 + a3 – a4, Energy at F = E + a1 – a2 + a3 – a4 + a5, Energy at G = E + a1 – a2 + a3 – a4 + a5 – a6, Prof. Sachin M. Shinde, KECSP, , Page 30
Page 31 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , = Energy at A (i.e. Cycle repeats after G), Let us now suppose that the greatest of these energies is at B and least at E., Therefore, Maximum energy in flywheel, = E + a1, Minimum energy in the flywheel, = E + a1 – a2 + a3 – a4, ∴ Maximum fluctuation of energy,, ∆ E = Maximum energy – Minimum energy, = (E + a1) – (E + a1 – a2 + a3 – a4) = a2 – a3 + a4, 4.14 Coefficient of Fluctuation of Energy, It may be defined as the ratio of the maximum fluctuation of energy to the work done, per cycle. Mathematically, coefficient of fluctuation of energy,, , The work done per cycle (in N-m or joules) may be obtained by using the following two, relations:, 1. Work done per cycle = Tmean × θ, Where Tmean = Mean torque, and, θ = Angle turned (in radians), in one revolution., =2π, in case of steam engine and two stroke internal combustion engines, = 4π, in case of four stroke internal combustion engines., The mean torque (Tmean) in N-m may be obtained by using the following relation:, , where ,P = Power transmitted in watts,, N = Speed in r.p.m., and, ω= Angular speed in rad/s = 2 πN/60, 2. The work done per cycle may also be obtained by using the following relation:, Work done per cycle =, where n = Number of working strokes per minute,, = N, in case of steam engines and two stroke internal combustion engines,, = N /2, in case of four stroke internal combustion engines., 4.15 Coefficient of Fluctuation of Speed, , Prof. Sachin M. Shinde, KECSP, , Page 31
Page 32 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , The difference between the maximum and minimum speeds during a cycle is, called the maximum fluctuation of speed. The ratio of the maximum fluctuation of speed, to the mean speed is called the coefficient of fluctuation of speed., Let N1 and N2 = Maximum and minimum speeds in r.p.m. during the cycle, and, N = Mean speed in r.p.m.=, ∴ Coefficient of fluctuation of speed,, =, , =, , =, , =, , (, (, , ), ), , (, , ), , (, , ), , The coefficient of fluctuation of speed is a limiting factor in the design of flywheel. It, varies depending upon the nature of service to which the flywheel is employed., Note. The reciprocal of the coefficient of fluctuate as coefficient of steadiness and is, denoted by m., m=, , 4.16 Energy Stored in a Flywheel, , Fig. 4.20 Flywheel, A flywheel is shown in Fig. 4.20 We show that when a flywheel absorbs energy, its, speed increases and when it gives up energy, its speed decreases., Let m = Mass of the flywheel in kg,, k = Radius of gyration of the flywheel in meters,, I = Mass moment of inertia of the flywheel about its axis of rotation in kg-m2 = m.k2,, N1 and N2 = Maximum and minimum speeds during the cycle in r.p.m.,, ω1 and ω2 = Maximum and minimum angular speeds during the cycle in rad/s,, N = Mean speed during the cycle in r.p.m. =, Prof. Sachin M. Shinde, KECSP, , Page 32
Page 33 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , ω = Mean angular speed during the cycle in rad/s =, , ==, , =, , We know that the mean kinetic energy of the flywheel,, , As the speed of the flywheel changes from ω1 to ω2, the maximum fluctuation of, energy, ∆E = Maximum K.E. – Minimum K.E., , The radius of gyration (k) may be taken equal to the mean radius of the rim (R), because, the thickness of rim is very small as compared to the diameter of rim. Therefore,, substituting k = R, in equation (ii), we have, ∆E = m.R2.ω2.CS = m.v2.CS, where v = Mean linear velocity (i.e. at the mean radius) in m/s = ω.R, Notes. 1. Since ω = 2 π N/60, therefore equation (i) may be written as, , 2. In the above expressions, only the mass moment of inertia of the flywheel rim (I) is, considered and the mass moment of inertia of the hub and arms is neglected. This is due, to the fact that the major portion of the mass of the flywheel is in the rim and a small, portion is in the hub and arms. Also the hub and arms are nearer to the axis of rotation,, therefore the mass moment of inertia of the hub and arms is small., Prof. Sachin M. Shinde, KECSP, , Page 33
Page 34 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , 4.17 Determination of flywheel size for different types of prime movers and, machines, 4.17.1 Dimensions of the Flywheel Rim, Consider a rim of the flywheel as shown in Fig. 4.17., Let D = Mean diameter of rim in meters,, R = Mean radius of rim in meters,, A = Cross-sectional area of rim in m2,, ρ= Density of rim material in kg/m3,, N = Speed of the flywheel in r.p.m.,, ω = Angular velocity of the flywheel in rad/s,, v = Linear velocity at the mean radius in m/s, = ω .R = π D.N/60, and, σ = Tensile stress or hoop stress in N/m2 due to the centrifugal force., , Fig. 4.21 Rim of a flywheel., Consider a small element of the rim as shown shaded in Fig. 4.21. Let it subtends an, angle δθ at the centre of the flywheel., Volume of the small element, = A × R.δθ, ∴ Mass of the small element, dm = Density × volume = ρ.A.R.δθ, and centrifugal force on the element, acting radially outwards,, dF = dm.ω2.R = ρ.A.R2.ω2.δθ, Vertical component of dF, = dF.sin θ = ρ.A.R2.ω2.δθ.sin θ, ∴ Total vertical upward force tending to burst the rim across the diameter X Y, = ρ.A.R2.ω2∫, , = ρ.A.R2.ω2 [, , Prof. Sachin M. Shinde, KECSP, , ]0π, Page 34
Page 35 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , =2ρ.A.R2.ω2 . . ……………………………. (i), This vertical upward force will produce tensile stress or hoop stress (also called, centrifugal stress or circumferential stress), and it is resisted by 2P, such that, 2P =2 σ.A . . ………………………………….. (ii), Equating equations (i) and (ii),, 2.ρ.A.R2.ω2 =2σ.A, or σ = ρ.R2.ω2 = ρ.v2 ....(∵ v = ω.R), …………………………………….(iii), , v=√, , We know that mass of the rim,, m = Volume × density = π D.A.ρ, ∴, , A=, , …………………………………(iv), , From equations (iii) and (iv), we may find the value of the mean radius and cross, sectional area of the rim., Note: If the cross-section of the rim is a rectangular, then, A=b×t, where b = Width of the rim, and, t = Thickness of the rim., 4.17.2 Flywheel in Punching Press, , Fig.4.22 Operation of flywheel in a punching press., , Prof. Sachin M. Shinde, KECSP, , Page 35
Page 36 :
Unit 4: Governor and Flywheel, , T.Y.BTech (Mech), , We know that the function of a flywheel in an engine is to reduce the fluctuations of, speed, when the load on the crankshaft is constant and the input torque varies during the, cycle. The flywheel can also be used to perform the same function when the torque is, constant and the load varies during the cycle. Such an application is found in punching, press or in a riveting machine. A punching press is shown diagrammatically in Fig.4.18., The crank is driven by a motor which supplies constant torque and the punch is at the, position of the slider in a slider-crank mechanism. From Fig.4.22, we see that the load, acts only during the rotation of the crank from θ = θ1 to θ = θ2, when the actual punching, takes place and the load is zero for the rest of the cycle. Unless a flywheel is used, the, speed of the crankshaft will increase too much during the rotation of crankshaft will, increase too much during the rotation of crank from θ = θ2 to θ = 2π and again from θ =, 0 to θ = θ1 , because there is no load while input energy continues to be supplied. On the, other hand, the drop in speed of the crankshaft is very large during the rotation of crank, from θ = θ1 to θ = θ2 due to much more load than the energy supplied. Thus the flywheel, has to absorb excess energy available at one stage and has to make up the deficient, energy at the other stage to keep to fluctuations of speed within permissible limits. This, is done by choosing the suitable moment of inertia of the flywheel., Let E1 be the energy required for punching a hole. This energy is determined by the size, of the hole punched, the thickness of the material and the physical properties of the, material., Let d1 = Diameter of the hole punched,, t1 = Thickness of the plate, and, , τu = Ultimate shear stress for the plate material., ∴ Maximum shear force required for punching,, Fs = Area sheared × Ultimate shear stress = π d1 t1 τu, It is assumed that as the hole is punched, the shear force decreases uniformly from, maximum value to zero., ∴ Work done or energy required for punching a hole,, , Assuming one punching operation per revolution, the energy supplied to the shaft per, revolution should also be equal to E1. The energy supplied by the motor to the, crankshaft during actual punching operation,, , Prof. Sachin M. Shinde, KECSP, , Page 36
Page 37 :
Unit 4: Governor and Flywheel, E2 = E1 (, , T.Y.BTech (Mech), , ), , ∴ Balance energy required for punching, = E1 - E2 = E1 – E1 (, , ) = E1( – (, , )), , This energy is to be supplied by the flywheel by the decrease in its kinetic energy when, its speed falls from maximum to minimum. Thus maximum fluctuation of energy,, ∆ E= E1 - E2 = E1( – (, , )), , The values of θ1 and θ2 may be determined only if the crank radius (r), length of, connecting rod (l) and the relative position of the job with respect to the crankshaft axis, are known. In the absence of relevant data, we assume that, (, Where, , ), , t = Thickness of the material to be punched,, s = Stroke of the punch = 2 × Crank radius = 2r, , By using the suitable relation for the maximum fluctuation of energy (∆E) as discussed, in the previous articles, we can find the mass and size of the flywheel., , Prof. Sachin M. Shinde, KECSP, , Page 37