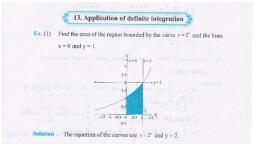
Notes of Class XII th Science, Mathematics Math Formulas Book For JEE MAIN & Advanced.pdf - Study Material
Page 1 :
Study Material BY JEEMAIN.INFO, , This Material is Downloaded From JEEMAIN.INFO., Please Bookmark our website and keep, checking the website for latest Study Material, and Tips., , AI, , N, , .IN, FO, , We also have Mock Test Series., , M, , 2, 3, 4, 5, 6, 7, 9, 9, 11, 14, 16, 18, 20, 22, 24, 25, 26, 28, 30, 35, 35, 39, 40, 40, 41, 43, , JE, E, , 1. Complex Number, 2. Theory of Equation (Quadratic Equation), 3. Sequence & Progression(AP, GP, HP, AGP, Spl. Series), 4. Permutation & Combination, 5. Determinant, 6. Matrices, 7. Logarithm and their properties, 8. Probability, 9. Function, 10 Inverse Trigonometric Functions, 11. Limit and Continuity & Differentiability of Function, 12. Differentiation & L' hospital Rule, 13. Application of Derivative (AOD), 14. Integration (Definite & Indefinite), 15. Area under curve (AUC), 16. Differential Equation, 17. Straight Lines & Pair of Straight Lines, 18. Circle, 19. Conic Section (Parabola 30, Ellipse 32, Hyperbola 33), 20. Binomial Theorem and Logarithmic Series, 21. Vector & 3-D, 22. Trigonometry-1 (Compound Angle), 23. Trigonometry-2 (Trigonometric Equations & Inequations), 24. Trigonometry-3 (Solutions of Triangle), 25. Syllbus IITJEE Physics, Chemistry, Maths & B.Arch, 26. Suggested Books for IITJEE
Page 2 :
(vi), , 1.COMPLEX NUMBERS, 1., , DEFINITION :, , Complex numbers are definited as expressions of the form a + ib where a, b ∈ R &, , (b), , i = −1 . It is denoted by z i.e. z = a + ib. ‘a’ is called as real part of z (Re z) and ‘b’ is called as, imaginary part of z (Im z). www.MathsBySuhag.com , www.TekoClasses.com, EVERY COMPLEX NUMBER CAN BE REGARDED AS, Purely real, if b = 0, , Purely imaginary, if a = 0, , Imaginary, if b ≠ 0, , (c), (d), , 6., (a), , a, , z1 − z 2 = z1 − z 2, , b = a b only if atleast one of either a or b is non-negative.www. Maths By Suhag .com, , ;, , (z) = z, , NOTE :(i), , (c), , (7), , z2, , =, , | z1 |, | z2 |, , , z2 ≠ 0 , | zn | = | z |n ;, , z1− z2 ≤ z1 + z2 ≤ z1 + z2 [ TRIANGLE INEQUALITY ], (i), amp (z1 . z2) = amp z1 + amp z2 + 2 kπ., k∈I, , (ii), , z , z2 , , amp 1 = amp z1 − amp z2 + 2 kπ ;, , k∈I, , amp(zn) = n amp(z) + 2kπ ., where proper value of k must be chosen so that RHS lies in (− π , π ]., VECTORIAL REPRESENTATION OF A COMPLEX :, Every complex number can be considered as if it is the position vector of that point. If the point P, , (iii), , →, , →, , →, , NOTE :(i), , →, , (ii), , if z > 0, , →, , Λ, , then OQ = OP eiφ, If A, B, C & D are four points representing the complex numbers z1, z2, , z3 & z4 then, z4 − z3, AB CD if, is purely real ;, z 2 − z1, z4 − z3, AB ⊥ CD if z − z is purely imaginary ], 2, , (iii), 8., , →, , If OP = z = r ei θ then OQ = z1 = r ei (θ + φ) = z . e iφ. If OP and OQ are of unequal magnitude, , Λ, , z is always non negative . Unlike real numbers z = , is not correct, − z if z < 0, , Argument of a complex number is a many valued function . If θ is the argument of a complex number, then 2 nπ + θ ; n ∈ I will also be the argument of that complex number. Any two arguments of a, complex number differ by 2nπ., The unique value of θ such that – π < θ ≤ π is called the principal value of the argument., Unless otherwise stated, amp z implies principal value of the argument., By specifying the modulus & argument a complex number is defined completely. For the complex number, 0 + 0 i the argument is not defined and this is the only complex number which is given by its, modulus.www.MathsBySuhag.com , www.TekoClasses.com, , z1, , ;, , represents the complex number z then, OP = z & OP = z., , y, (angle made by OP with positive x−axis), x, , z, , ; z2 ≠ 0, , | z1 + z2 |2 + | z1 – z2 |2 = 2 [| z1 |2 + | z 2 |2 ] www.MathsBySuhag.com , www.TekoClasses.com, , . z = x 2 + y 2, , θ = tan−1, , z1 +z 2 = z1 + z 2 ;, , 2, | z | ≥ 0 ; | z | ≥ Re (z) ; | z | ≥ Im (z) ; | z | = | z | = | – z | ; z z = | z | ;, , | z1 z2 | = | z1 | . | z2 |, , AI, , M, , JE, E, , eg, , ;, , z1 , = z1, z , z2, 2, , ; z1 z 2 = z1 . z 2, , .IN, FO, , (b), , N, , CONJUGATE COMPLEX :, If z = a + ib then its conjugate complex is obtained by changing the sign of its imaginary part &, is denoted by z . i.e. z = a − ib., Note that : www.MathsBySuhag.com , www.TekoClasses.com, (iii), z z = a² + b² which is real, (ii), z − z = 2i Im(z), (i), z + z = 2 Re(z), (iv), If z lies in the 1st quadrant then z lies in the 4th quadrant and − z lies in the 2nd quadrant., 3., ALGEBRAIC OPERATIONS :, The algebraic operations on complex numbers are similiar to those on real numbers treating i as a, polynomial. Inequalities in complex numbers are not defined. There is no validity if we say that complex, number is positive or negative., e.g. z > 0, 4 + 2i < 2 + 4 i are meaningless ., However in real numbers if a2 + b2 = 0 then a = 0 = b but in complex numbers,, z12 + z22 = 0 does not imply z1 = z2 = 0.www.MathsBySuhag.com , www.TekoClasses.com, 4., EQUALITY IN COMPLEX NUMBER :, Two complex numbers z1 = a1 + ib1 & z2 = a2 + ib2 are equal if and only if their real & imaginary, parts coincide., 5., REPRESENTATION OF A COMPLEX NUMBER IN VARIOUS FORMS:, (a), Cartesian Form (Geometric Representation) :, Every complex number z = x + i y can be represented by a point on the, cartesian plane known as complex plane (Argand diagram) by the ordered, pair (x, y)., length OP is called modulus of the complex number denoted by z & θ, is called the argument or amplitude, , (iii), (iv), (v), , ; z − z = 2 i Im (z), , z + z = 2 Re (z), , i = −1 is called the imaginary unit. Also i² = − l ; i3 = −i ; i4 = 1 etc., , 2., , (ii), , eix + e −ix, eix − e −ix, & sin x =, are known as Euler's identities., 2, 2, Exponential Representation :, z = reiθ ; | z | = r ; arg z = θ ; z = re− iθ, IMPORTANT PROPERTIES OF CONJUGATE / MODULI / AMPLITUDE :, If z , z1 , z2 ∈ C then ;, , Also cos x =, , (c), , Note :, (a), The set R of real numbers is a proper subset of the Complex Numbers. Hence the Complete Number, system is N ⊂ W ⊂ I ⊂ Q ⊂ R ⊂ C., (b), Zero is both purely real as well as purely imaginary but not imaginary., , There exists a one-one correspondence between the points of the plane and the members of the set of, complex numbers., Trignometric / Polar Representation :, z = r (cos θ + i sin θ) where | z | = r ; arg z = θ ; z = r (cos θ − i sin θ), Note: cos θ + i sin θ is also written as CiS θ., , 1, , If z1, z2, z3 are the vertices of an equilateral triangle where z0 is its circumcentre, , then (a) z 12 + z 22 + z 23 − z1 z2 − z2 z3 − z3 z1 = 0 (b) z 12 + z 22 + z 23 = 3 z 20, DEMOIVRE’S THEOREM :, Statement : cos n θ + i sin n θ is the value or one of the values of (cos θ + i sin θ)n ¥ n ∈ Q. The, theorem is very useful in determining the roots of any complex quantity, Note : Continued product of the roots of a complex quantity should be determined using theory, of equations.
Page 3 :
(iii), , (iv), (v), , 10., , (ii), , 11., (i), , 1p +, , α 1p, , +, , α 2p, , + ...., , = 0 if p is not an integral multiple of n, = n if p is an integral multiple of n, (iii), (1 − α1) (1 − α2) ...... (1 − αn − 1) = n, &, (1 + α1) (1 + α2) ....... (1 + αn − 1) = 0 if n is even and 1 if n is odd., (iv), 1 . α1 . α2 . α3 ......... αn − 1 = 1 or −1 according as n is odd or even., THE SUM OF THE FOLLOWING SERIES SHOULD BE REMEMBERED :, sin (nθ 2 ), n +1, cos , cos θ + cos 2 θ + cos 3 θ + ..... + cos n θ =, θ., sin (θ 2 ), 2 , , Centroid of the ∆ ABC =, , z1 + z 2 + z 3, 3, , (a sec A )z1 + (b sec B)z 2 + (c sec C)z3, , : (b), , (i) arg, (J), , z − z2, z − z1, , = ±, , π, 2, , or (z − z1) ( z − z 2) + (z − z2) ( z − z 1) = 0, , Condition for four given points z1 , z2 , z3 & z4 to be concyclic is, the number, z 3 − z1 z 4 − z 2, is real. Hence the equation of a circle through 3 non collinear points z1, z2 & z3 can be, ., z 3 − z 2 z 4 − z1, , (z − z 2 ) (z3 − z1 ), (z − z1 ) (z3 − z 2 ) is real, , ⇒, , (z − z 2 )(z 3 − z1 ) (z − z 2 )(z3 − z1 ), (z − z1 )(z3 − z 2 ) = (z − z1 )(z3 − z2 ), , 13.(a) Reflection points for a straight line :Two given points P & Q are the reflection points for a, given straight line if the given line is the right bisector of the segment PQ. Note that the two points denoted by the, complex numbers z1 & z2 will be the reflection points for the straight line α z + α z + r = 0 if and only if, ; α z + α z + r = 0 , where r is real and α is non zero complex constant., 1, 2, (b) Inverse points w.r.t. a circle :www.MathsBySuhag.com , www.TekoClasses.com, Two points P & Q are said to be inverse w.r.t. a circle with centre 'O' and radius ρ, if :, (i) the point O, P, Q are collinear and on the same side of O., (ii) OP . OQ = ρ2., Note that the two points z1 & z2 will be the inverse points w.r.t. the circle, zz + αz+αz + r =0 if and only if z1 z 2 + αz1 +αz 2 +r =0 ., 14., PTOLEMY’S THEOREM :www.MathsBySuhag.com , www.TekoClasses.com, It states that the product of the lengths of the diagonals of a convex quadrilateral inscribed in a, circle is equal to the sum of the lengths of the two pairs of its opposite sides., i.e., z1 − z3 z2 − z4 = z1 − z2 z3 − z4 + z1 − z4 z2 − z3., 15., LOGARITHM OF A COMPLEX QUANTITY :, 1, β, , (i), Loge (α + i β) = Loge (α² + β²) + i 2nπ + tan −1 where n ∈ I., 2, α, , , OR, , ii represents a set of positive real numbers given by, , n ∈ I., , The general form of a quadratic equation in x is , ax2 + bx + c = 0 , where a , b , c ∈ R & a ≠ 0., , z1 tan A + z 2 tan B + z 3 tan C, , z, The equation of a line passing through z1 & z2 can be expressed in the determinant form as z1, z2, , (ii), , π, , − 2 nπ+ , 2, e , ,, , 2.THEORY OF EQUATIONS (QUADRATIC EQUATIONS), , Orthocentre of the ∆ ABC =, , −b± b 2 −4ac, RESULTS :1. The solution of the quadratic equation , ax² + bx + c = 0 is given by x =, 2a, 2, The expression b – 4ac = D is called the discriminant of the quadratic equation., 2., If α & β are the roots of the quadratic equation ax² + bx + c = 0, then;, , a sec A + b sec B + c sec C, tan A + tan B + tan C, (c), Incentre of the ∆ ABC = (az1 + bz2 + cz3) ÷ (a + b + c) ., (d), Circumcentre of the ∆ ABC = :, (Z1 sin 2A + Z2 sin 2B + Z3 sin 2C) ÷ (sin 2A + sin 2B + sin 2C) ., (B), amp(z) = θ is a ray emanating from the origin inclined at an angle θ to the x− axis., (C), z − a = z − b is the perpendicular bisector of the line joining a to b., (D), The equation of a line joining z1 & z2 is given by ;, z = z1 + t (z1 − z2) where t is a perameter.www.MathsBySuhag.com , www.TekoClasses.com, (E)z = z1 (1 + it) where t is a real parameter is a line through the point z1 & perpendicular to oz1., (F), , (I), , Circle will be real if α α − r ≥ 0 ., αα −r ., The equation of the circle described on the line segment joining z1 & z2 as diameter is :, , AI, , JE, E, , M, , sin θ + sin 2 θ + sin 3 θ + ..... + sin n θ =, , (a), , α z + α z + r = 0 where r is real and α is a non zero complex constant., (H), The equation of circle having centre z0 & radius ρ is : z − z0 = ρ or, z z − z0 z − z 0 z + z 0 z0 − ρ² = 0 which is of the form zz + αz+αz +r = 0 , r is real centre − α & radius, , taken as, , +α pn − 1, , sin (nθ 2 ) n + 1 , sin , θ., sin (θ 2 ), 2 , Note : If θ = (2π/n) then the sum of the above series vanishes., 12., STRAIGHT LINES & CIRCLES IN TERMS OF COMPLEX NUMBERS :, nz + mz 2, (A), If z1 & z2 are two complex numbers then the complex number z = 1, divides the joins of z1, m+n, & z2 in the ratio m : n., Note:(i), If a , b , c are three real numbers such that az1 + bz2 + cz3 = 0 ;, where a + b + c = 0, and a,b,c are not all simultaneously zero, then the complex numbers z1 , z2 & z3 are collinear., (ii), If the vertices A, B, C of a ∆ represent the complex nos. z1, z2, z3 respectively, then :, (ii), , z (z1 − z 2 ) − z (z1 − z 2 ) + (z1z 2 − z1z 2 ) = 0, which on manipulating takes the form as, , .IN, FO, , (ii), , (G), , = 0. This is also the condition for three complex numbers to be collinear., Complex equation of a straight line through two given points z 1 & z 2 can be written as, , N, , 9., , − 1+ i 3 − 1 − i 3, ., ,, CUBE ROOT OF UNITY :(i)The cube roots of unity are 1 ,, 2, 2, If w is one of the imaginary cube roots of unity then 1 + w + w² = 0. In general, 1 + wr + w2r = 0 ; where r ∈ I but is not the multiple of 3., In polar form the cube roots of unity are :, 2π, 4π, 2π, 4π, + i sin, cos 0 + i sin 0 ; cos, + i sin , cos, 3, 3, 3, 3, The three cube roots of unity when plotted on the argand plane constitute the verties of an equilateral, triangle.www.MathsBySuhag.com , www.TekoClasses.com, The following factorisation should be remembered :, (a, b, c ∈ R & ω is the cube root of unity), x2 + x + 1 = (x − ω) (x − ω2) ;, a3 − b3 = (a − b) (a − ωb) (a − ω²b) ;, a3 + b3 = (a + b) (a + ωb) (a + ω2b) ;, a3 + b3 + c3 − 3abc = (a + b + c) (a + ωb + ω²c) (a + ω²b + ωc), nth ROOTS OF UNITY :www.MathsBySuhag.com , www.TekoClasses.com, If 1 , α1 , α2 , α3 ..... αn − 1 are the n , nth root of unity then :, (i), They are in G.P. with common ratio ei(2π/n), &, , z 1, z1 1, z2 1, , (i) α + β = – b/a, (ii) α β = c/a, (iii) α – β = D / a ., 3.NATURE OF ROOTS:(A)Consider the quadratic equation ax² + bx + c = 0 where a, b, c ∈ R &, a≠ 0 then (i) D > 0 ⇔ roots are real & distinct (unequal)., (ii)D = 0 ⇔ roots are real & coincident, (equal)., (iii), D < 0 ⇔ roots are imaginary ., (iv), If p + i q is one root of a quadratic equation,, then the other must be the conjugate p − i q & vice versa. (p , q ∈ R & i = − 1 )., (B), Consider the quadratic equation ax2 + bx + c = 0 where a, b, c ∈ Q & a ≠ 0 then;, (i), If D > 0 & is a perfect square , then roots are rational & unequal., (ii), , If α = p + q is one root in this case, (where p is rational & q is a surd) then the other
Page 4 :
root must be the conjugate of it i.e. β = p − q & vice versa., 4., A quadratic equation whose roots are α & β is (x − α)(x − β) = 0 i.e., x2 − (α + β) x + α β = 0 i.e. x2 − (sum of roots) x + product of roots = 0., 5.Remember that a quadratic equation cannot have three different roots & if it has, it becomes an identity., 6., Consider the quadratic expression , y = ax² + bx + c , a ≠ 0 & a , b , c ∈ R then, (i), The graph between x , y is always a parabola . If a > 0 then the shape of the, parabola is concave upwards & if a < 0 then the shape of the parabola is concave downwards., (ii), ∀ x ∈ R , y > 0 only if a > 0 & b² − 4ac < 0 (figure 3) ., (iii), ∀ x ∈ R , y < 0 only if a < 0 & b² − 4ac < 0 (figure 6) ., , abc + 2 fgh − af2 − bg2 − ch2 = 0, , Fig. 1, , 11., , THEORY OF EQUATIONS :, , ∑ α1 α2 = +, , Note : (i), (ii), , y, , (iii), , a>0, a>0, , f, , c, , If α1, α2, α3, ......αn are the roots of the equation;, , f(x) = a0xn + a1xn-1 + a2xn-2 + .... + an-1x + an = 0 where a0, a1, .... an are all real & a0 ≠ 0 then, ∑ α1 = −, , Fig. 2, y, , h g, h b f = 0., , g, , Carefully go through the 6 different shapes of the parabola given below., y, , a, OR, , a>0, , a1, ,, a0, , a2, a, a, , ∑ α1 α2 α3 = − 3 , ....., α1 α2 α3 ........αn = (−1)n n, a0, a0, a0, , If α is a root of the equation f(x) = 0, then the polynomial f(x) is exactly divisible by (x − α) or, (x − α) is a factor of f(x) and conversely ., Every equation of nth degree (n ≥ 1) has exactly n roots & if the equation has more than n roots,, it is an identity., If the coefficients of the equation f(x) = 0 are all real and α + iβ is its root, then α − iβ is also a, root. i.e. imaginary roots occur in conjugate pairs., , If the coefficients in the equation are all rational & α + β is one of its roots, then α − β is also, a root where α, β ∈ Q & β is not a perfect square., (v), If there be any two real numbers 'a' & 'b' such that f(a) & f(b) are of opposite, signs, then f(x) = 0 must have atleast one real root between 'a' and 'b' ., (vi)Every eqtion f(x) = 0 of degree odd has atleast one real root of a sign opposite to that of its last term., 12., LOCATION OF ROOTS :, www.MathsBySuhag.com , www.TekoClasses.com, 2, Let f (x) = ax + bx + c, where a > 0 & a, b, c ∈ R., (i), Conditions for both the roots of f (x) = 0 to be greater than a specified number ‘d’ are, b2 − 4ac ≥ 0; f (d) > 0 & (− b/2a) > d., (ii), Conditions for both roots of f (x) = 0 to lie on either side of the number ‘d’ (in other words, the number ‘d’ lies between the roots of f (x) = 0) is f (d) < 0., (iii), Conditions for exactly one root of f (x) = 0 to lie in the interval (d , e) i.e. d < x < e are b2, − 4ac > 0 & f (d) . f (e) < 0., (iv), Conditions that both roots of f (x) = 0 to be confined between the numbers p & q, are (p < q). b2 − 4ac ≥ 0; f (p) > 0; f (q) > 0 & p < (− b/2a) < q., 13., LOGARITHMIC INEQUALITIES, For a > 1 the inequality 0 < x < y & loga x < loga y are equivalent., (i), (ii), For 0 < a < 1 the inequality 0 < x < y & loga x > loga y are equivalent., (iii), If a > 1 then loga x < p, ⇒, 0 < x < ap, (iv), If a > 1 then logax > p, ⇒, x > ap, (v), If 0 < a < 1 then loga x < p ⇒, x > ap, (vi), If 0 < a < 1 then logax > p ⇒, 0 < x < ap, www.MathsBySuhag.com , www.TekoClasses.com, (iv), , O, , x2, , x, , x, , O, , Roots are real &, , Roots are, , Fig. 4, , x, , O, , .IN, FO, , x1, , Roots are complex, , Fig. 5, , y, , O, , x, , x, , O, , a<0, , x2, , O, , a<0, , x, , Roots are real &, , Roots are, , M, , x1, , AI, , a<0, , N, , y, , y, , Roots are complex, , JE, E, , 7. SOLUTION OF QUADRATIC INEQUALITIES:, ax2 + bx + c > 0 (a ≠ 0)., (i), If D > 0, then the equation ax2 + bx + c = 0 has two different roots x1 < x2., Then, a > 0 ⇒ x ∈ (−∞, x1) ∪ (x2, ∞), a < 0 ⇒ x ∈ (x1, x2)www.MathsBySuhag.com , www.TekoClasses.com, (ii), If D = 0, then roots are equal, i.e. x1 = x2., In that case, a > 0 ⇒ x ∈ (−∞, x1) ∪ (x1, ∞), a<0 ⇒ x∈φ, P (x ), (iii)Inequalities of the form, Q (x ), , 0 can be quickly solved using the method of, , intervals., , 8.MAXIMUM & MINIMUM VALUE of y = ax² + bx + c occurs at x = − (b/2a) according as ; a < 0 or, , 4 ac − b 2, , 4 ac − b 2 , a>0. y∈ , , ∞ if a > 0 & y ∈ − ∞ ,, if a < 0 ., 4a , , , 4a, , 9.COMMON ROOTS OF 2 QUADRATIC EQUATIONS [ONLY ONE COMMON ROOT] :, Let α be the common root of ax² + bx + c = 0 & a′x2 + b′x + c′ = 0 Thereforea α² + bα + c = 0 ;, 1, α2, α, a′α² + b′α + c′ = 0. By Cramer’s Rule, Therefore, α =, =, =, bc′ − b′c a ′c − ac′ ab′ − a ′b, ca ′−c′a bc′−b′c, =, .So the condition for a common root is (ca′ − c′a)² = (ab′ − a′b)(bc′ − b′c)., ab′−a ′b a ′c−ac′, 10., The condition that a quadratic function f (x , y) = ax² + 2 hxy + by² + 2 gx + 2 fy + c may be resolved, into two linear factors is that ;, , 3.Sequence & Progression(AP, GP, HP, AGP, Spl. Series), DEFINITION :, A sequence is a set of terms in a definite order with a rule for obtaining the terms., e.g. 1 , 1/2 , 1/3 , ....... , 1/n , ........ is a sequence., AN ARITHMETIC PROGRESSION (AP) :AP is a sequence whose terms increase or decrease by, a fixed number. This fixed number is called the common difference. If a is the first term & d the common, difference, then AP can be written as a, a + d, a + 2 d, ....... a + (n – 1)d, ........ nth term of this AP tn = a +, (n – 1)d, where d = an – an-1. The sum of the first n terms of the AP is given by ; Sn =, , n, 2, , [2 a + (n – 1)d] =, , n, 2, , [a, , + l]. where l is the last term., NOTES :(i) If each term of an A.P. is increased, decreased, multiplied or divided by the same non zero number,, then the resulting sequence is also an AP., (ii), Three numbers in AP can be taken as a – d , a , a + d ; four numbers in AP can be taken as a – 3d, a –, d, a + d, a + 3d ; five numbers in AP are a – 2d , a – d , a, a + d, a + 2d & six terms in AP are a – 5d,, a – 3d, a – d, a + d, a + 3d, a + 5d etc., (iii), The common difference can be zero, positive or negative., (iv) The sum of the two terms of an AP equidistant from the beginning & end is constant and equal to the sum, of first & last terms.
Page 5 :
(i), , nth, , term =, , a rn –1, , (ii), , Sum of the, , Ist, , n terms i.e. Sn =, , (, , ) , if r ≠ 1 ., , a rn −1, r −1, , Sum of an infinite GP when r < 1 when n → ∞ → 0 if r < 1 therefore,, a, ( | r |< 1) ., S∞ =, 1−r, (iv), If each term of a GP be multiplied or divided by the same non-zero quantity, the resulting sequence is, also a GP., (v), Any 3 consecutive terms of a GP can be taken as a/r, a, ar ; any 4 consecutive terms of a GP can be taken, as a/r3, a/r, ar, ar3 & so on., (vi), If a, b, c are in GP ⇒ b2 = ac.www.MathsBySuhag.com , www.TekoClasses.com, HARMONIC PROGRESSION (HP) :A sequence is said to HP if the reciprocals of its terms are in, AP.If the sequence a1, a2, a3, .... , an is an HP then 1/a1, 1/a2, .... , 1/an is an AP & converse. Here we, do not have the formula for the sum of the n terms of an HP. For HP whose, rn, , (iii), , first term is a & second term is b, the nth term is tn =, , If a, b, c are in HP ⇒ b =, , 2ac, or, a+c, , n, , (i) ∑ (ar ± br) =, , N, , AI, , M, , JE, E, , = a + d , = a + 2 d , ...... , An = a + nd ,, , NOTE : Sum of n AM’s inserted between a & b is equal to n times the single AM between a & b, , i.e., , (iii), , r =1, , GEOMETRIC MEANS :, If a, b, c are in GP, b is the GM between a & c., b² = ac, therefore b = a c ; a > 0, c > 0., n-GEOMETRIC MEANS BETWEEN a, b :, If a, b are two given numbers & a, G1, G2, ..... , Gn, b are in GP. Then, G1, G2, G3 , ...., Gn are n GMs between a & b ., , G1 = a(b/a)1/n+1, G2 = a(b/a)2/n+1, ...... , Gn = a(b/a)n/n+1, = ar ,, = ar² ,, ......, = arn, where r = (b/a)1/n+1, NOTE : The product of n GMs between a & b is equal to the nth power of the single GM between a & b, , r =1, , n, , ∑, , r =1, , n, , (iv), , (1 − r) 2, , ., , THEOREMS :, , n, , n, , n, , n, , n, , r =1, , r =1, , r =1, , r =1, , r =1, , ∑ r=, , n (n + 1), 2, , (sum of the first n natural nos.), , n (n + 1) (2n + 1), (sum of the squares of the first n natural numbers), 6, , n, n 2 (n + 1) 2 r , ∑, r3 =, r = 1 , 4, , ∑ r4 =, , r =1, , 2, , (sum of the cubes of the first n natural numbers), , n, (n + 1) (2n + 1) (3n² + 3n − 1)www.MathsBySuhag.com , www.TekoClasses.com, 30, , METHOD OF DIFFERENCE : If T1, T2, T3, ...... , Tn are the terms of a sequence then some, times the terms T2 − T1, T3 − T2 , ....... constitute an AP/GP. nth term of the series is determined & the, sum to n terms of the sequence can easily be obtained., Remember that to find the sum of n terms of a series each term of which is composed of r factors in AP,, the first factors of several terms being in the same AP, we “write down the nth term, affix the next factor, at the end, divide by the number of factors thus increased and by the common difference and add a, constant. Determine the value of the constant by applying the initial conditions”., , 4.PERMUTATION AND COMBINATION, , n, , ∑ Ar = nA where A is the single AM between a & b., , ∑ r² =, , dr, , ∑ ar ± ∑ br.(ii) ∑ k ar = k ∑ ar.(iii) ∑ k = nk ; where k is a constant., , (i), , n, , (ii), , n - ARITHMETIC MEANS BETWEEN TWO NUMBERS :, If a, b are any two given numbers & a, A1, A2, .... , An, b are in AP then A1, A2, ... An are the n AM’s, between a & b ., , b−a, n +1, , SIGMA NOTATIONS, , r =1, , a 1 + a 2 + a 3 + ..... + a n, .www.MathsBySuhag.com , www.TekoClasses.com, n, , where d =, , 1− r, , n, , a−b, a, = b−c., c, , n (b − a ), 2 (b − a ), b−a, , ...... , An = a +, , A2 = a +, n +1, n+1, n+1, , a, n, +, If r < 1 & n → ∞ then Limit, n → ∞ r = 0 . S∞ =, , RESULTS, , ARITHMETIC MEAN :, If three terms are in AP then the middle term is called the AM between the other two, so if a, b, c are in, AP, b is AM of a & c ., AM for any n positive number a1, a2, ... , an is ;, , A1 = a +, , HARMONIC MEAN :, If a, b, c are in HP, b is the HM between a & c, then b = 2ac/[a + c]., THEOREM :, If A, G, H are respectively AM, GM, HM between a & b both being unequal & positive then,, (i), G² = AH, (ii), A > G > H (G > 0). Note that A, G, H constitute a GP., ARITHMETICO-GEOMETRIC SERIES :, A series each term of which is formed by multiplying the corresponding term of an AP & GP is called the, Arithmetico-Geometric Series. e.g. 1 + 3x + 5x2 + 7x3 + ....., Here 1, 3, 5, .... are in AP & 1, x, x2, x3 ..... are in GP., www.MathsBySuhag.com , www.TekoClasses.com, Standart appearance of an Arithmetico-Geometric Series is, Let Sn = a + (a + d) r + (a + 2 d) r² + ..... + [a + (n − 1)d] rn−1, SUM TO INFINITY :, , r =1, , ab, ., b + (n − 1) (a − b), , MEANS, , A=, , n, , i.e. r π= 1 Gr = (G)n where G is the single GM between a & b., , .IN, FO, , (v), Any term of an AP (except the first) is equal to half the sum of terms which are equidistant from it., (vi), tr = Sr − Sr−1, (vii) If a , b , c are in AP ⇒ 2 b = a + c., GEOMETRIC PROGRESSION (GP) :, GP is a sequence of numbers whose first term is non zero & each of the succeeding terms is equal to the, proceeding terms multiplied by a constant . Thus in a GP the ratio of successive terms is constant. This, constant factor is called the COMMON RATIO of the series & is obtained by dividing any term by that, which immediately proceeds it. Therefore a, ar, ar2, ar3, ar4, ...... is a GP with a as the first term & r as, common ratio.www.MathsBySuhag.com , www.TekoClasses.com, , DEFINITIONS :1. PERMUTATION : Each of the arrangements in a definite order which can be made by, taking some or all of a number of things is called a PERMUTATION., 2.COMBINATION : Each of the groups or selections which can be made by taking some or all of a, number of things without reference to the order of the things in each group is called a COMBINATION., FUNDAMENTAL PRINCIPLE OF COUNTING :, If an event can occur in ‘m’ different ways, following which another event can occur in ‘n’ different ways,, then the total number of different ways of simultaneous occurrence of both events in a definite order is, m × n. This can be extended to any number of events., RESULTS :(i), A Useful Notation : n! = n (n − 1) (n − 2)......... 3. 2. 1 ; n ! = n. (n − 1) !0! = 1! = 1 ; (2n)!, n, = 2 . n ! [1. 3. 5. 7...(2n − 1)] Note that factorials of negative integers are not defined., (ii), , If n P r denotes the number of permutations of n different things, taking r at a time, then
Page 6 :
n!, Note that , nPn = n !., =, n, (n, −, 1), (n, −, 2)....., (n, −, r, +, 1), =, r, (n − r )!, (iii), If n C r denotes t he number of combinations of n different things taken r at a time, then, n, n!, Pr, nC =, where r ≤ n ; n ∈ N and r ∈ W., =, r, r!(n − r )!, r!, (iv), The number of ways in which (m + n) different things can be divided into, (m + n ) !, two groups containing m & n things respectively is :, If m = n, the groups are equal & in this case the, m!n!, (2n )!, ; for in any one way it is possible to interchange the two groups, number of subdivision is, n!n!2!, without obtaining a new distribution. However, if 2n things are to be divided, (2n )!, equally between two persons then the number of ways =, ., n!n!, (v), Number of ways in which (m + n + p) different things can be divided into three groups containing m , n &, (m + n + p)!, p things respectively is, , m ≠ n ≠ p., m!n!p!, (3n )!, If m = n = p then the number of groups =, .However, if 3n things are to be divided equally among, n!n!n!3!, (3n )!, ., three people then the number of ways =, (n!) 3, (vi)The number of permutations of n things taken all at a time when p of them are similar & of one type, q of them, are similar & of ano ther type, r o f them are similar & of a t hird type & the remaining, n – (p + q + r) are all different is : n! .www.MathsBySuhag.com , www.TekoClasses.com, p!q!r!, (vii) The number of circular permutations of n different things taken all at a time is ; (n − 1)!. If clockwise &, , = (p0 + p1 + p2 +.... + pa) (q0 + q1 + q2 +.... + qb) (r0 + r1 + r2 +.... + rc)...., , nP, , 1 1 1, n 1 , ., letter goes into its own envelope is = n! − + +...........+(−1), n! , 2! 3! 4 !, (xvii) Some times students find it difficult to decide whether a problem is on permutation or combination or, both. Based on certain words / phrases occuring in the problem we can fairly decide its nature as per the, following table :www.MathsBySuhag.com , www.TekoClasses.com, PROBLEMS OF COMBINATIONS PROBLEMS OF PERMUTATIONS, , � Selections , choose, � Distributed group is formed, � Committee, � Geometrical problems, , a1, , Total number of ways in which it is possible to make a selection by taking some or all out of, p + q + r +...... things , where p are alike of one kind, q alike of a second kind , r alike of third kind & so, on is given by :, (p + 1) (q + 1) (r + 1)........ –1.www.MathsBySuhag.com , www.TekoClasses.com, , (x)Number of ways in which it is possible to make a selection of m + n + p = N things , where p are alike, of one kind , m alike of second kind & n alike of third kind taken r at a time is given by coefficient of xr in the, expansion of (1 + x + x2 +...... + xp) (1 + x + x2 +...... + xm) (1 + x + x2 +...... + xn)., Note : Remember that coefficient of xr in (1 − x)−n = n+r−1Cr (n ∈ N). For example the number of ways in which, a selection of four letters can be made from the letters of the word PROPORTION is given by coefficient, of x4 in (1 + x + x2 + x3) (1 + x + x2) (1 + x + x2) (1 + x) (1 + x) (1 + x)., (xi), Number of ways in which n distinct things can be distributed to p persons if there is no restriction, to the number of things received by men = pn.www.MathsBySuhag.com , www.TekoClasses.com, (xii), , =, , nC, n−r, , ;, , nC, 0, , =, , nC, n, , =, , 1;b.nCx, , =, , nC, y, , ⇒ x = y or x + y = n, , c.nCr, , +, , nC, r−1, , =, , 2., , n, n−1, n+1, if n is even. (b) r =, or, if n is odd., 2, 2, 2, , nC, r, , (xv), , Let N = pa. qb. rc...... where p , q , r...... are distinct primes & a , b , c..... are natural numbers then:, (a), The total numbers of divisors of N including 1 & N is = (a + 1)(b + 1)(c + 1)....., , (b), , The sum of these divisors is, , b1, b2, b3, , c1, c2 is called the determinant of order three ., c3, b2, , c2, , b1, , a2, , c2, , are concurrent if ,, , a1, a2, a3, , c2, , a2, , b1, , c1, , + a3 b c, 2, 2, , OR, , b2, , − b1 a c, + c1 a b ....... and so on .In this manner we can expand a, b 3 c3, 3, 3, 3, 3, determinant in 6 ways using elements of ; R1 , R2 , R3 or C1 , C2 , C3 ., Following examples of short hand writing large expressions are :, (i), The lines :, a1x + b1y + c1 = 0........ (1), a2x + b2y + c2 = 0........ (2), a3x + b3y + c3 = 0........ (3), D = a1, , 3., , b2, , c1, , − a2 b c, 3, 3, , Its value can be found as : D = a1 b c, 3, 3, , b1, b2, b3, , c1, c2 = 0 ., c3, , Condition for the consistency of three simultaneous linear equations in 2 variables., (ii) ax² + 2 hxy + by² + 2 gx + 2 fy + c = 0 represents a pair of straight lines if, a, , h g, , abc + 2 fgh − af² − bg² − ch² = 0 = h b f, , n+1C, r, , (xiv), , is maximum if : (a) r =, , 5.DETERMINANT, , b1, , a1, a, The symbol 2, a3, , Number of ways in which n identical things may be distributed among p persons if each person may, receive none , one or more things is ; n+p−1Cn., , (xiii)a.nCr, , � Arrangements, � Standing in a line seated in a row, � problems on digits, � Problems on letters from a word, , 1 The symbol a b is called the determinant of order two ., 2, 2, Its value is given by :, D = a 1 b2 − a 2 b1, , M, , JE, E, , (ix), , 1, 2, , (d), Number of ways in which a composite number N can be resolved into two factors, which are relatively prime (or coprime) to each other is equal to 2n−1 where n is the number of, different prime factors in N., [ Refer Q.No.28 of Ex−I ], (xvi) Grid Problems and tree diagrams., DEARRANGEMENT :, Number of ways in which n letters can be placed in n directed letters so that no, , AI, , Note : Number of circular permutations of n things when p alike and the rest different taken all at a time, (n − 1)!, distinguishing clockwise and anticlockwise arrangement is, ., p!, (viii) Given n different objects, the number of ways of selecting at least one of them is ,, nC + nC + nC +.....+ nC = 2n − 1. This can also be stated as the total number of combinations of n, 1, 2, 3, n, distinct things., , + 1)(b + 1)(c + 1)...., if N is not a perfect square, [(a + 1)(b + 1)(c + 1).... + 1] if N is a perfect square, 1 (a, 2, , .IN, FO, , (n−1)!, ., 2, , Number of ways in which N can be resolved as a product of two, , factors is =, , N, , anti−clockwise circular permutations are considered to be same, then it is, , (c), , g, , (iii), , f, , c, , Area of a triangle whose vertices are (xr , yr) ; r = 1 , 2 , 3 is :, 1, D=, 2, , x1, , y1 1, , x2, , y2 1, , x3, , y3 1, , If D = 0 then the three points are collinear .
Page 8 :
Abbreviated as : A = [ a i j ] 1 ≤ i ≤ m ; 1 ≤ j ≤ n, i denotes, the row andj denotes the column is called a matrix of order m × n., 2., Special Type Of Matrices :, A = [ a11 , a12 , ...... a1n ] having one row . (1 × n) matrix. (or row vectors), (a), Row Matrix :, (b), , a 11 , a , 21, Column Matrix : A = having one column. (m × 1) matrix (or column vectors), :, , , a m1 , , (c), , Zero or Null Matrix :, 0 0, A = 0 0 is a 3 × 2, 0 0 , , (e), , (f), Note, , A, , null matrix, , 1 0 , 1 0 , 1 1 , 1 1 , = 0 0 ; B = 0 0 ; AB = 0 0 ;BA = 0 0 ⇒ AB ≠ BA (in general), , , , , , , , , , 1 1 −1 1 , 0 0 , AB = 2 2 1 −1 = 0 0 ⇒ AB = O ⇒, A = O or B = O, /, , , , , , Note: If A and B are two non- zero matrices such that AB = O then A and B are called the divisors of zero., Also if [AB] = O ⇒ | AB | ⇒ | A | | B | = 0 ⇒ | A | = 0 or | B | = 0 but not the converse. If A and B are, two matrices such that, (i), AB = BA ⇒ A and B commute each other, (ii), AB = – BA ⇒ A and B anti commute each other, 3., Matrix Multiplication Is Associative :, If A , B & C are conformable for the product AB & BC, then (A . B) . C = A . (B . C), 4., Distributivity :, 2., , (A = Om × n) An m × n matrix all whose entries are zero ., 0 0 0, & B = 0 0 0, 0 0 0, , Matrix multiplication is not commutative ., , is 3 × 3 null matrix, , A (B + C ) = A B + A C , Provided A, B & C are conformable for respective products, (A + B) C = A C + BC , , 1 2 3 4 , Horizontal Matrix : A matrix of order m × n is a horizontal matrix if n > m. , , 2 5 1 1, 2 5, 1 1 , , Verical Matrix :, A matrix of order m × n is a vertical matrix if m > n. , 3 6, , , 2 4, Square Matrix : (Order n)If number of row = number of column, ⇒ a square matrix., a 11 a 12 , , a 21 a 22 , , POSITIVE INTEGRAL POWERS OF A SQUARE MATRIX :, For a square matrix A ,, A2 A = (A A) A = A (A A) = A3 ., Note that for a unit matrix I of any order , Im = I for all m ∈ N., 6., MATRIX POLYNOMIAL :, If f (x) = a0xn + a1xn – 1 + a2xn – 2 + ......... + anx0 then we define a matrix polynomial f (A) = a0An + a1An–, 1, + a2An–2 + ..... + anIn where A is the given square matrix. If f (A) is the null matrix then A is called the zero, or root of the polynomial f (x)., DEFINITIONS :(a) Idempotent Matrix : A square matrix is idempotent provided A2 = A., Note that An = A ∀ n > 2 , n ∈ N., (b), Nilpotent Matrix: A square matrix is said to be nilpotent matrix of order m, m ∈ N, if, Am = O , Am–1 ≠ O., (c), Periodic Matrix : A square matrix is which satisfies the relation AK+1 = A, for some positive integer K, is, a periodic matrix. The period of the matrix is the least value of K for which this holds true., Note that period of an idempotent matrix is 1., (d), Involutary Matrix : If A2 = I , the matrix is said to be an involutary matrix., Note that A = A–1 for an involutary matrix., 7., The Transpose Of A Matrix : (Changing rows & columns), Let A be any matrix . Then , A = ai j, of order m × n, T, ⇒, A or A′ = [ aj i ] for 1 ≤ i ≤ n & 1 ≤ j ≤ m of order n × m, Properties of Transpose : If AT & BT denote the transpose of A and B ,, (a), (A ± B)T = AT ± BT ; note that A & B have the same order., IMP. (b), (A B)T = BT AT A & B are conformable for matrix product AB., (c), (AT)T = A, (d), (k A)T = k AT, k is a scalar ., , N, , (i)In a square matrix the pair of elements aij & aj i are called Conjugate Elements .e.g. , , 5., , .IN, FO, , (d), , 1., , [, , ], , JE, E, , M, , AI, , (ii)The elements a11 , a22 , a33 , ...... ann are called Diagonal Elements . The line along which the diagonal, elements lie is called " Principal or Leading " diagonal. The qty Σ ai i = trace of the matrice written, as , i.e. tr A Triangular Matrix Diagonal Matrix denote as ddia (d1 , d2 , ....., dn) all elements except the leading, diagonal are zero diagonal Matrix Unit or Identity Matrix, Note: Min. number of zeros in a diagonal matrix of order n = n(n – 1) "It is to be noted that with square matrix, there is a corresponding determinant formed by the elements of A in the same order.", 3., Equality Of Matrices :, Let, A = [a i j ] & B = [b i j ] are equal if ,, (i), both have the same order . (ii), ai j = b i j for each pair of i & j., 4.Algebra Of Matrices :Addition : A + B = a i j + b i j where A & B are of the same type. (order), (a) Addition of matrices is commutative., i.e., A + B = B + A, A = m × n; B = m × n, (b)Matrix addition is associative .(A + B) + C = A + (B + C) Note : A , B & C are of the same type., (c) Additive inverse., If A + B = O = B + A A = m × n, a b c , 5., Multiplication Of A Matrix By A Scalar : IfA = b c a ;k A =, c a b, , , 6.Multiplication Of Matrices : (Row by Column)AB exists if , A = m × n, AB exists , but BA does not, ⇒ AB ≠ BA, , ka kb kc , kb kc ka , kc ka k b , , , , & B= n×p 2×3, , b1 , b , A = prefactor, 2, Note : In the product AB , , A = (a1 , a2 , ...... an) &B = : 1 × n, B, =, post, factor, , , b n , , [ ], , B = [a1 b1 + a2 b2 + ...... + an bn] If A = a i j, , [ ], , m × n & B = bi j, , (A B)i j =, , ∑, , r =1, , ai r . br j, , 3×3, , [ ], , A square matrix A = a i j, (Note A = AT), , is said to be , symmetric if , ai j = aj i ∀ i & j (conjugate elements are equal), , Note: Max. number of distinct entries in a symmetric matrix of order n is, , n×1 A, , n×p, , n, , matrix , then, , 8., , General :, (A1 , A2 , ...... An)T = A Tn , ....... , A 2T , A1T (reversal law for transpose), Symmetric & Skew Symmetric Matrix :, , Properties Of Matrix Multiplication :, , n ( n + 1), ., 2, , and skew symmetric if , ai j = − aj i ∀ i & j (the pair of conjugate elements, are additive inverse of each other) (Note A = –AT ) Hence If A is skew symmetric, then, ai i = − ai i ⇒ ai i = 0 ∀ i Thus the digaonal elements of a skew symmetric matrix are all zero , but, not the converse ., Properties Of Symmetric & Skew Matrix :, P − 1 A is symmetric if, AT = A, A is skew, symmetric if AT = − A, P − 2 A + AT is a symmetric matrix A − AT, is a skew symmetric matrix . Consider (A + AT)T = AT +, T T, T, T, T, (A ), = A +A = A+A, A + A is symmetric ., Similarly we can prove that A − AT
Page 9 :
is skew symmetric ., P − 3 The sum of two symmetric matrix is a symmetric matrix and the sum of two skew symmetric matrix, is a skew symmetric matrix . Let AT = A ; BT = B, where A & B have the same order . (A +, T, B) = A + B Similarly we can prove the other, P − 4 If A & B are symmetric matrices then ,, (a), A B + B A is a symmetric matrix (b), AB − BA is a skew symmetric matrix ., P − 5 Every square matrix can be uniquely expressed as a sum of a symmetric and a skew symmetric matrix., , A = 0 , matrix method fails, , If (adj A) . B = null matrix = O, , If (adj A) . B ≠ O, , Consistent (Infinite solutions), Inconsistent (no solution), ================================================================================, , 1, 1, (A − AT), (A + AT) +, 2, 2, , P, Symmetric, , If, , Q, Skew Symmetric, , 7.LOGARITHM AND THEIR PROPERTIES, THINGS TO REMEMBER :1.LOGARITHM OF A NUMBER :The logarithm of the number N, to the base 'a' is the exponent indicating the power to which the base 'a' must be raised to obtain, the number N. This number is designated as loga N. Hence : logaN = x ⇔ ax = N , a > 0, a ≠ 1, & N >0If a = 10then we write log b rather than log10 b If a = e , we write ln b rather than loge b.The, existence and uniqueness of the number loga N follows from the properties of an experimental, functions . From the definition of the logarithm of the number N to the base 'a' , we have an identity, , a11 a12 a13 , , , a, 9., Adjoint Of A Square Matrix : Let, A=, = a 21 a 22 a 23 be a square matrix, ij, a, , 31 a 32 a 33 , C11 C12 C13 , , , and let the matrix formed by the cofactors of [ai j ] in determinant A is = C 21 C 22 C 23 . Then, C, , 31 C32 C33 , C11 C 21 C31 , , , (adj A) = C12 C 22 C32 V. Imp. Theorem : A (adj. A) = (adj. A).A = |A| In , If A be a square, C, , 13 C 23 C33 , , [ ], , log N, , (iii), , loga Mα = α . loga M, , (iv), , logb M =, , log a M, , NOTE : � logba . logab = 1 ⇔ logba = 1/logab., , N, , matrix of order n., Note : If A and B are non singular square matrices of same order, then, n– 1, (ii), adj (AB) = (adj B) (adj A), (i), | adj A | = | A |, (iii), adj(KA) = Kn–1 (adj A), K is a scalar, Inverse Of A Matrix (Reciprocal Matrix) :A square matrix A said to be invertible (non singular) if there, exists a matrix B such that, A B = I = B A, B is called the inverse (reciprocal) of A and is denoted by A −1 . Thus, A −1 = B ⇔ A B = I = B A ., We have , A . (adj A) = A In, , : a a = N , a > 0 , a ≠ 1 & N > 0 This is known as the FUNDAMENTAL LOGARITHMIC IDENTITY, NOTE :, loga1 = 0(a > 0 , a ≠ 1); loga a = 1(a > 0 , a ≠ 1) and, log1/a a = - 1 (a > 0 , a ≠ 1), 2., THE PRINCIPAL PROPERTIES OF LOGARITHMS :Let M & N are arbitrary posiitive numbers, , a > 0 , a ≠ 1 , b > 0 , b ≠ 1 and α is any real number then ;, (i)loga (M . N) = loga M + loga N, (ii), loga (M/N) = loga M − loga N, , .IN, FO, , A =, , (4), , ∴, , A −1 =, , (adj A), |A|, , JE, E, , Note : The necessary and sufficient condition for a square matrix A to be invertible is that A ≠ 0., Imp. Theorem : If A & B are invertible matrices ofthe same order , then (AB) −1 = B −1 A −1. This is, reversal law for inverseNote :(i)If A be an invertible matrix , then AT is also invertible & (AT) −1 = (A −1)T., (ii), If A is invertible, (a) (A −1) −1 = A ; (b) (Ak) −1 = (A− 1)k = A–k, k ∈ N, (iii), If A is an Orthogonal Matrix. AAT = I = ATAwww.MathsBySuhag.com , www.TekoClasses.com, (iv), A square matrix is said to be orthogonal if , A −1 = AT ., , 1, SYSTEM OF EQUATION & CRITERIAN FOR CONSISTENCY, |A|, GAUSS - JORDAN METHOD, x + y + z = 6,, x − y + z = 2,, 2x + y − z = 1, , (v), , | A–1 | =, , or, , x + y+z , 6, x − y+ z , , , = 2, 1, 2x + y−z , , 1 1 1 , 1 −1 1 , , , 2 1 −1 , , x, 6, y, 2, = 1, , z, , A X = B ⇒ A −1 A X = A −1 B ⇒ X = A −1, , n, a = a1/n., �, For a non negative number 'a' & n ≥ 2 , n ∈ N, ================================================================================, , 8.PROBABILITY, (adj. A).B, B =, ., |A|, , A ≠ 0 & (adj A) . B ≠ O (Null matrix) , system is consistent having unique non − trivial, , solution .(3) If A ≠ 0 & (adj A) . B = O, solution, , ln a x, , � logy x . logz y . loga z = logax., � e = ax, 3., PROPERTIES OF MONOTONOCITY OF LOGARITHM :, (i), For a > 1 the inequality 0 < x < y & loga x < loga y are equivalent., (ii), For 0 < a < 1 the inequality 0 < x < y & loga x > loga y are equivalent., (iii), If a > 1 then loga x < p, ⇒, 0 < x < ap, (iv), If a > 1 then logax > p, ⇒, x > ap (v) If 0 < a < 1 then loga x < p ⇒ x > ap, (vi), If 0 < a < 1 then logax > p ⇒, 0 < x < ap, NOTE THAT :, �, If the number & the base are on one side of the unity , then the logarithm is positive ; If the number & the, base are on different sides of unity, then the logarithm is negative., �, The base of the logarithm ‘a’ must not equal unity otherwise numbers not equal to unity will not have, a logarithm & any number will be the logarithm of unity., , (i), (ii), (iii), , Note :(1)If A ≠ 0, system is consistent having unique solution, , (2)If, , � logba . logcb . logac = 1, , AI, , In (adj A) = A −1 A In, , M, , A −1 A (adj A) = A −1 In |Α|;, , log a b, , (Null matrix) , system is consistent having trivial, , THINGS TO REMEMBER :RESULT − 1, , SAMPLE–SPACE : The set of all possible outcomes of an experiment is called the SAMPLE–SPACE(S)., EVENT : A sub set of sample−space is called an EVENT., COMPLEMENT OF AN EVENT A : The set of all out comes which are in S but not in A is called the, COMPLEMENT OF THE EVENT A DENOTED BY A OR A ., COMPOUND EVENT : If A & B are two given events then A∩B is called COMPOUND EVENT and is, denoted by A∩B or AB or A & B ., MUTUALLY EXCLUSIVE EVENTS : Two events are said to be MUTUALLY EXCLUSIVE (or disjoint or, incompatible) if the occurence of one precludes (rules out) the simultaneous occurence of the other . If A, & B are two mutually exclusive events then P (A & B) = 0., C, , (iv), (v)
Page 10 :
EQUALLY LIKELY EVENTS : Events are said to be EQUALLY LIKELY when each event is as likely to occur as, any other event., (vii) EXHAUSTIVE EVENTS : Events A,B,C ........ L are said to be EXHAUSTIVE EVENTS if no event outside this set, can result as an outcome of an experiment . For example, if A & B are two, events defined on a sample space S, then A & B are exhaustive ⇒ A ∪ B = S⇒ P (A ∪ B) = 1 ., (viii) CLASSICAL DEF. OF PROBABILITY : If n represents the total number of equally likely , mutually exclusive, and exhaustive outcomes of an experiment and m of them are favourable to the happening of the event, A, then the probability of happening of the event A is given by P(A) = m/n ., (vi), , x, and P( A ) =, (x + y), , We say that ODDS IN FAVOUR OF A are x: y & odds against A are y : x, , Opposite of′ " atleast A or B " is, , NIETHER, , (v), , (vi), (vii), , If A & B are mutually exclusive then P(A∪B) = P(A) + P(B)., For any two events A & B, P(exactly one of A , B occurs), = P ( A ∩ B ) + P (B ∩ A ) =, , (, , P ( A ) + P ( B ) − 2 P ( A ∩ B), , ), , (, , ), , = P (A ∪ B) − P (A ∩ B) = P A ∪ B − P A ∩ B, If A & B are any two events P(A∩B) = P(A).P(B/A) = P(B).P(A/B), Where P(B/A) means conditional, probability of B given A & P(A/B) means conditional probability of A given B. (This can be easily seen, from the figure), DE MORGAN'S LAW : − If A & B are two subsets of a universal set U , then, (a), (A∪B)c = Ac∩Bc &, (b), (A∩B)c = Ac∪Bc, A ∪ (B∩C) = (A∪B) ∩ (A∪C) & A ∩ (B∪C) = (A∩B) ∪ (A∩C), c, , A ∩ B∩C, , c, , c, , c, , C∩ B∩ A, , A∩C∩ B, , C∩A∩ B, , P (B1/A) =, , A∩B, Fig . 1, , (iii), (iv), , B∩ A ∩ C, , A∩ B∩C, , ←C, , P(exactly one of A,B,C occurs) =, P(A) + P(B) + P(C) − 2P(B∩C) − 2P(C∩A) − 2P(A∩B)+3P(A∩B∩C)Fig. 2, NOTE : If three events A, B and C are pair wise mutually exclusive then they must be mutually exclusive., i.e P(A∩B) = P(B∩C) = P(C∩A) = 0 ⇒ P(A∩B∩C) = 0. However the converse of this is not true., RESULT − 4 INDEPENDENT EVENTS : Two events A & B are said to be independent if occurence or, non occurence of one does not effect the probability of the occurence or non occurence of other., (i), If the occurence of one event affects the probability of the occurence of the other event then the events, are said to be DEPENDENT or CONTINGENT . For two independent events, A and B : P(A∩B) = P(A). P(B). Often this is taken as the definition of independent events., (ii), Three events A , B & C are independent if & only if all the following conditions hold ;, P(A∩B) = P(A) . P(B), ;, P(B∩C) = P(B) . P(C), P(C∩A) = P(C) . P(A), &, P(A∩B∩C) = P(A) . P(B) . P(C), i.e. they must be pairwise as well as mutually independent ., Similarly for n events A1 , A2 , A3 , ...... An to be independent , the number of, these conditions is equal to nc2 + nc3 + ..... + ncn = 2n − n − 1., (iii)The probability of getting exactly r success in n independent trials is given by P(r) = nCr pr qn−r, where: p = probability of success in a single trial q = probability of failure in a single trial. note : p + q = 1, Note : Independent events are not in general mutually exclusive & vice versa., Mutually exclusiveness can be used when the events are taken from the same experiment & independence, can be used when the events are taken from different experiments ., RESULT − 5 : BAYE'S THEOREM OR TOTAL PROBABILITY THEOREM :, If an event A can occur only with one of the n mutually exclusive and exhaustive events B1, B2, .... Bn &, the probabilities P(A/B1) , P(A/B2) ....... P(A/Bn) are known then,, , A NOR B .e. A + B = 1-(A or B) = A ∩ B, Note that P(A+B) + P( A ∩ B ) = 1., , A ∩ B∩ C, , .IN, FO, , A ∩ B A ∩ B B∩ A, , P(A. B ) + P( A .B) + P(A.B) = 1 − P( A . B ), , (ii), , U, , JE, E, , RESULT − 2www.MathsBySuhag.com , www.TekoClasses.com, AUB = A+ B = A or B denotes occurence of at least A or, B. For 2 events A & B : (See fig.1), (i), P(A∪B) = P(A) + P(B) − P(A∩B) =, , A∩ B∩C, , (iv), , M, , Comparative study of Equally likely , Mutually Exclusive and Exhaustive events., Experiment, Events, E/L, M/E, Exhaustive, 1. Throwing of a die, A : throwing an odd face {1, 3, 5}, No, Yes, No, B : throwing a composite face {4,. 6}, 2. A ball is drawn from, E1 : getting a W ball, No, Yes, Yes, an urn containing 2W,, E2 : getting a R ball, 3R and 4G balls, E3 : getting a G ball, 3. Throwing a pair of, A : throwing a doublet, dice, {11, 22, 33, 44, 55, 66}, B : throwing a total of 10 or, Yes, No, No, more {46, 64, 55, 56, 65, 66}, 4. From a well shuffled, E1 : getting a heart, pack of cards a card is, E2 : getting a spade, Yes, Yes, Yes, drawn, E3 : getting a diamond, E4 : getting a club, 5. From a well shuffled, A = getting a heart, pack of cards a card is, B = getting a face card, No, No, No, drawn, , P(A or B or C) = P(A) + P(B), + P(C) − P(A∩B) − P(B∩C)−, P(C∩A) + P(A∩B∩C), (ii), P (at least two of A,B,C occur) =, P(B∩C) + P(C∩A) +, P(A∩B) − 2P(A∩B∩C), (iii), P(exactly two of A,B,C occur) =, P(B∩C) + P(C∩A) +, P(A∩B) − 3P(A∩B∩C), www.MathsBySuhag.com , www.TekoClasses.com, , U, ←B, , N, , y, (x + y ), , 0 ≤ P(A) ≤ 1, (2), P(A) + P( A ) = 1, Where A = Not A ., If x cases are favourable to A & y cases are favourable to A then P(A) =, , (i), , A→, , AI, , Note : (1), (3), , RESULT − 3, For any three events A,B and C we have (See, Fig. 2), , P (Bi ). P (A / Bi ), , n, , ∑, , i =1, , P (Bi ). P (A / Bi ), , PROOF :The events A occurs with one of the n mutually exclusive & exhaustive, events B1,B2,B3,........Bn; A = AB1 + AB2 + AB3 + ....... + ABn, n, , P(A) = P(AB1) + P(AB2) +.......+ P(ABn) =, , ∑, i =1, , NOTE : A ≡ event what we have ;, B1 ≡ event what we want ;, B2, B3, ....Bn are alternative event ., Now, P(ABi ) = P(A) . P(Bi/A), = P(Bi ) . P(A/Bi), P (Bi / A) =, , P (Bi ) . P (A / B i ), P (A), , =, , P(ABi ), , B2, B1, , B3, , Bn−1, A, , P (Bi ) . P (A / Bi ), n, , ∑, i =1, , P (ABi ), , Fig . 3, , Bn
Page 11 :
P ( Bi / A) =, , P (Bi ) . P (A / Bi ), , ∑ P (B ) . P ( A / B ), i, , i, , RESULT − 6 If p1 and p2 are the probabilities of speaking the truth of two indenpendent witnesses A, and B thenP (their combined statement is true) =, , p1 p 2, p1 p 2 + (1 − p1 )(1 − p 2 ), , . In this case it has been, , 3., (i), , assumed that we have no knowledge of the event except the statement made by A and B., However if p is the probability of the happening of the event before their statement then, P (their combined statement is true) =, , p p1 p 2, p p1 p 2 + (1 − p ) (1 − p1 ) (1 − p 2 ), , ., , (ii)Mean of any probability distribution of a random variable is given by : µ =, , ∑p x, ∑p, i, , i, , =, , ∑, , pi xi, , i, , ( Since Σ pi = 1 ), , ‘ X, , ’, , i s, , g i v e n, , b y, , ; P, , Variance of a random variable is given by, σ² = ∑ ( xi − µ)² . pi, , ( Note that SD = + σ 2 )(iv) The probability distribution for a binomial variate, n, Cr pr qn−r where all symbols have the same meaning as given in result 4. The, , ( X, , =, , r ) =, , recurrence formula P (r + 1) = n − r . p, P ( r), r +1 q, , FRACTIONAL RATIONAL FUNCTION : A rational function is a function of the form. y = f (x) =, , (iv), , where g (x) & h (x) are polynomials & h (x) ≠ 0., ABSOLUTE VALUE FUNCTION :, A function y = f (x) = x is called the absolute value function or, , (V), EXPONENTIAL FUNCTION :A function f(x) = ax = ex ln a (a > 0 , a ≠ 1, x ∈ R) is called anexponential, function. The inverse of the exponential function is called the logarithmic function . i.e. g(x) = loga x ., Note that f(x) & g(x) are inverse of each other & their graphs are as shown ., , M, , AI, , P(1) , P(2). P(3) etc. if P(0) is known . (v) Mean of BPD = np ; variance of BPD = npq ., (vi), If p represents a persons chance of success in any venture and ‘M’ the sum of money which he, will receive in case of success, then his expectations or probable value = pM, expectations = pM, RESULT − 8 : GEOMETRICAL APPLICATIONS : The following statements are axiomatic :, (i) If a point is taken at random on a given staright line AB, the chance that it falls on a particular, segment PQ of the line is PQ/AB . (ii) If a point is taken at random on the area S which includes an, area σ , the chance that the point falls on σ is σ/S ., , used only as the meaning of a single valued function, if not otherwise stated., , x, Pictorially : , , →, input, , f (x ) = y, → , y is called the image of x & x is the pre-image of y under f. Every function from A → B, output, , satisfies the following conditions ., (i), f ⊂ A x B (ii) ∀ a ∈ A ⇒ (a, f(a)) ∈ f and (iii)(a, b) ∈ f & (a, c) ∈ f ⇒ b = c, DOMAIN, CO−DOMAIN & RANGE OF A FUNCTION :, Let f : A → B, then the set A is known as the domain of f & the set B is known as co-domain of f . The, set of all f images o f elements of A is known as t he range of f . Thus, , +∞, , �, , +∞, , �, , (0, 1), , f(x) = ax , 0 < a < 1, , (0, 1), , JE, E, , THINGS TO REMEMBER :, 1., GENERAL DEFINITION :, If to every value (Considered as real unless other−wise stated) of a variable x, which belongs to some, collection (Set) E, there corresponds one and only one finite value of the quantity y, then y is said to be, a function (Single valued) of x or a dependent variable defined on the set E ; x is the argument or, independent variable ., If to every value of x belonging to some set E there corresponds one or several values of the variable y,, then y is called a multiple valued function of x defined on E.Conventionally the word "FUNCTION” is, , 2., , if x ≥ 0, , x, , Modulus function. It is defined as : y = x= , − x if x < 0, , , is very helpful for quickly computing, , 9.FUNCTIONS, , g(x), h (x ), , (iii), , N, , σ² = ∑ pi x²i − µ², , (iii), , (ii), , .IN, FO, , Here it has been assumed that the statement given by all the independent witnesses can be given in two, ways only, so that if all the witnesses tell falsehoods they agree in telling the same falsehood., If this is not the case and c is the chance of their coincidence testimony then the, Pr. that the statement is true = P p1 p2 Pr. that the statement is false = (1−p).c (1−p1)(1−p2), However chance of coincidence testimony is taken only if the joint statement is not contradicted by any, witness., RESULT − 7 (i) A PROBABILITY DISTRIBUTION spells out how a total probability of 1 is distributed over several, values of a random variable .www.MathsBySuhag.com , www.TekoClasses.com, , Range of f = {f(a) a ∈ A, f(a) ∈ B}, Domain of f = {a a ∈ A, (a, f(a)) ∈ f}, It should be noted that range is a subset of co−domain . If only the rule of function is given then the domain of, the function is the set of those real numbers, where function is defined. For a continuous function, the interval, from minimum to maximum value of a function gives the range., IMPORTANT TYPES OF FUNCTIONS :, POLYNOMIAL FUNCTION :, If a function f is defined by f (x) = a0 xn + a1 xn−1 + a2 xn−2 + ... + an−1 x + an where n is a non negative integer, and a0, a1, a2, ..., an are real numbers and a0 ≠ 0, then f is called a polynomial function of degree n, NOTE : (a), A polynomial of degree one with no constant term is called an odd linear, function . i.e. f(x) = ax , a ≠ 0, (b) There are two polynomial functions , satisfying the relation ;, f(x).f(1/x) = f(x) + f(1/x). They are :, (i) f(x) = xn + 1 & (ii) f(x) = 1 − xn , where n is a positive integer ., ALGEBRAIC FUNCTION :y is an algebraic function of x, if it is a function that satisfies an algebraicequation of, the formP0 (x) yn + P1 (x) yn−1 + ....... + Pn−1 (x) y + Pn (x) = 0 Where n is a positive integer and, P0 (x), P1 (x) ........... are Polynomials in x., e.g. y = x is an algebraic function, since it satisfies the equation y² − x² = 0., Note that all polynomial functions are Algebraic but not the converse. A function that is not algebraic is, called TRANSCEDENTAL FUNCTION .www.MathsBySuhag.com , www.TekoClasses.com, , 45º, , �, (1, 0), , 45º, , �, , (1, 0), , g(x) = loga x, , (vi), , y = 1 if x > 0, , SIGNUM FUNCTION :, A function y= f (x) = Sgn (x) is defined as follows :, 1 for x > 0, y = f (x) = 0 for x = 0, , − 1 for x < 0, , > x, y = Sgn x, y = −1 if x < 0, , y�, It is also written as Sgn x = |x|/ x ; x ≠ 0 ; f (0) = 0, (vii) GREATEST INTEGER OR STEP UP FUNCTION :, graph of y = [x], 3, The function y = f (x) = [x] is called the greatest, 2, •, integer function where [x] denotes the greatest integer, less than or equal to x . Note that for :, 1 •, º, −1 ≤ x < 0 ;, [x] = − 1, 0≤x< 1, ;, [x] = 0, •, º, ;, [x] = 1, 2≤x < 3, ;, [x] = 2 −3, 1≤x< 2, −2, −1, 1, 2, −1, •, º, and so on ., 3, , Properties of greatest integer function :, (a), [x] ≤ x < [x] + 1 and, x − 1 < [x] ≤ x , 0 ≤ x − [x] < 1, , •, , º, , −2, , −3, , º, , �, x, , ,
Page 12 :
(b), (c), (d), , −−−−, −−, , x1 / n , (n ∈ N), , Function, (y = f (x) ), (iv), , B., , if n is odd, , R+ ,, , if n is even, , R,, , Range, , , (n ∈ N), , tan x, sec x, , (i.e. values taken by f (x) ), , R – {0} , if n is odd, , R – {0} ,, , if n is odd, , R+ ,, , R+ ,, , if n is even, , if n is even, , R, R, , [–1, + 1], [–1, + 1], , π, R – (2k + 1) , k ∈ I, 2, , R, , R – (2k + 1), , J., , π π, − 2 , 2 , , , [ 0, π], , sin–1 x, , [–1, + 1], , (ii), , cos–1 x, , [–1, + 1], , (iii), , tan–1 x, , R, , π π, − , , 2 2, , (– ∞ , – 1 ] ∪ [ 1 , ∞ ), , π π, − 2 , 2 – { 0 }, , , , (v), , –1, , cosec x, sec–1 x, , (vi), cot –1 x, Exponential Functions, (i), ex, , 1, {x}, Modulus Functions, Function, (y = f (x) ), (i), |x|, , (ii), , (i), , (iv), , H., , if n is odd, R+ ∪ {0} , if n is even, , π, , k ∈I, (– ∞ , – 1 ] ∪ [ 1 , ∞ ), 2, (v), cosec x, R – kπ , k ∈ I, (– ∞ , – 1 ] ∪ [ 1 , ∞ ), (vi), cot x, R – kπ , k ∈ I, R, Inverse Circular Functions (Refer after Inverse is taught ), (iv), , D., , x1 / n, , R,, if n is odd, R+ ∪ {0} , if n is even, Domain, (i.e. values taken by x), , R – {0} ,, , I., , Trigonometric Functions, (i), sin x, (ii), cos x, (iii), , C., , 1, , 1, [x], Fractional Part Functions, (i), {x}, (ii), , R – {0}, , (– ∞ , – 1 ] ∪ [ 1 , ∞ ), R, R, , 5., , π , [ 0, π] – , 2 , ( 0, π), R+, , 6., , R+, , 1, |x|, , R+ – { 1 }, R+, R+ – { 1 }, R, , R+ – { 1 }, , Integral Part Functions Functions, (i), [x], R, (ii), , G., , R–{0}, R, R –{0}, , 1, logxa = log x (a > 0 ) (a ≠ 1), a, , .IN, FO, , (iii), , F., , N, , (ii), , 1, , (n ∈ N), xn, , (ii), e1/x, (iii), ax , a > 0, (iv), a1/x , a > 0, Logarithmic Functions, (i), logax , (a > 0 ) (a ≠ 1), (ii), , AI, , A., , M, , 4., , E., , JE, E, , (viii), , [x + m] = [x] + m if m is an integer ., y�, graph of y = {x}, [x] + [y] ≤ [x + y] ≤ [x] + [y] + 1, [x] + [− x] = 0 if x is an integer, 1− − −, º, º, º, º, = − 1 otherwise ., −−, FRACTIONAL PART FUNCTION :, •, •, • �x, •, •, It is defined as :, −1, 1, 2, g (x) = {x} = x − [x] ., e.g. the fractional part of the no. 2.1 is, 2.1− 2 = 0.1 and the fractional part of − 3.7 is 0.3. The period of this function is 1 and graph of thi s, function is as shown .www.MathsBySuhag.com , www.TekoClasses.com, DOMAINS AND RANGES OF COMMON FUNCTION :, Function, Domain, Range, (y = f (x) ), (i.e. values taken by x), (i.e. values taken by f (x) ), Algebraic Functions, (i), xn , (n ∈ N), R = (set of real numbers), R,, if n is odd, R+ ∪ {0} , if n is even, , R–{0}, I, , R – [0, 1 ), , 1, , , n ∈ I − {0} , n, , , R, , [0, 1), , R–I, , (1, ∞), , Domain, (i.e. values taken by x), R, R–{0}, , Range, (i.e. values taken by f (x) ), R+ ∪ { 0 }, R+, , Signum Function, , |x|, ,x ≠0, R, {–1, 0 , 1}, sgn (x) x, =0,x=0, Constant Functionwww.MathsBySuhag.com , www.TekoClasses.com, say f (x) = c, R, {c}, EQUAL OR IDENTICAL FUNCTION :, Two functions f & g are said to be equal if :, (i), The domain of f = the domain of g., (ii), The range of f = the range of g, and, (iii), f(x) = g(x) , for every x belonging to their common domain. eg., x, 1, & g(x) = 2 are identical functions ., f(x) =, x, x, CLASSIFICATION OF FUNCTIONS : One − One Function (Injective mapping) :, A function f : A → B is said to be a one−one function or injective mapping if different elements of A, have different f images in B . Thus for x1, x2 ∈ A & f(x1) ,, f(x2) ∈ B , f(x1) = f(x2) ⇔ x1 = x2 or x1 ≠ x2 ⇔ f(x1) ≠ f(x2) ., Diagramatically an injective mapping can be shown as, , =, , OR, Note : (i), , Any function which is entirely increasing or decreasing in whole domain, then, f(x) is one−one ., (ii), If any line parallel to x−axis cuts the graph of the function atmost at one point,, then the function is one−one ., Many–one function :, A function f : A → B is said to be a many one function if two or more elements of A have the same
Page 13 :
f image in B . Thus f : A → B is many one if for ; x1, x2 ∈ A , f(x1) = f(x2) but x1 ≠ x2, Diagramatically a many one mapping can be shown as, , OR, Any continuous function which has atleast one local maximum or local minimum, then f(x) is, many−one . In other words, if a line parallel to x−axis cuts the graph of the function atleast, at two points, then f is many−one .www.MathsBySuhag.com , www.TekoClasses.com, (ii), If a function is one−one, it cannot be many−one and vice versa ., Onto function (Surjective mapping) :, If the function f : A → B is such that each element in B, (co−domain) is the f image of atleast one element in A, then we say that f is a function of A 'onto' B . Thus, f : A → B is surjective iff ∀ b ∈ B, ∃ some a ∈ A such that f (a) = b ., Diagramatically surjective mapping can be shown as, , OR, Note that : if range = co−domain, then f(x) is onto. Into function :, If f : A → B is such that there exists atleast one element in co−domain which is not the image of any, element in domain, then f(x) is into ., Diagramatically into function can be shown as, , 8., , 9., , N, AI, , 11., , M, , (a), , one−one onto (injective & surjective), , (b), , one−one into (injective but not surjective), , (c), , many−one onto (surjective but not injective), , (d), , many−one into (neither surjective nor injective), , JE, E, , Note that : If a function is onto, it cannot be into and vice versa . A polynomial of degree even will always, be into., Thus a function can be one of these four types :, , Note : (i), If f is both injective & surjective, then it is called a Bijective mapping., The bijective functions are also named as invertible, non singular or biuniform functions., (ii), If a set A contains n distinct elements then the number of different functions defined from, A → A is nn & out of it n ! are one one., Identity function : The function f : A → A defined by f(x) = x ∀ x ∈ A is called the identity of A and is, denoted by IA. It is easy to observe that identity function is a bijection ., Constant function : A function f : A → B is said to be a constant function if every element of A has the, same f image in B . Thus f : A → B ; f(x) = c , ∀ x ∈ A , c ∈ B is a constant function. Note that the range, of a constant function is a singleton and a constant function may be one-one or many-one, onto or into ., 7., ALGEBRAIC OPERATIONS ON FUNCTIONS :, If f & g are real valued functions of x with domain set A, B respectively, then both f & g are defined, in A ∩ B. Now we define f + g , f − g , (f . g) & (f/g) as follows :, , (iii), , f, f (x), (x) =, g, g (x ), , domain is {x x ∈ A ∩ B s . t g(x) ≠ 0} ., , COMPOSITE OF UNIFORMLY & NON-UNIFORMLY DEFINED FUNCTIONS :, Let f : A → B & g : B → C be two functions . Then the function gof : A → C defined, by (gof) (x) = g (f(x)) ∀ x ∈ A is called the composite of the two functions f & g ., f (x), , 10., , OR, , (f ± g) (x) = f(x) ± g(x), (f . g) (x) = f(x) . g(x), , x→, Diagramatically , →, → g (f(x)) .Thus the image of every x ∈ A under the, , function gof is the g−image of the f−image of x ., Note that gof is defined only if ∀ x ∈ A, f(x) is an element of the domain of g so that we can take its, g-image. Hence for the product gof of two functions f & g, the range of f must be a subset of the domain, of g. PROPERTIES OF COMPOSITE FUNCTIONS :, (i), The composite of functions is not commutative i.e. gof ≠ fog ., (ii), The composite of functions is associative i.e. if f, g, h are three functions such that fo (goh) &, (fog) oh are defined, then fo (goh) = (fog) oh ., (iii), The composite of two bijections is a bijection i.e. if f & g are two bijections such that gof is, defined, then gof is also a bijection.www.MathsBySuhag.com , www.TekoClasses.com, HOMOGENEOUS FUNCTIONS :, A function is said to be homogeneous with respect to any set of variables when each of its terms, is of the same degree with respect to those variables ., For example 5 x2 + 3 y2 − xy is homogeneous in x & y . Symbolically if ,, f (tx , ty) = tn . f (x , y) then f (x , y) is homogeneous function of degree n ., BOUNDED FUNCTION :, A function is said to be bounded if f(x) ≤ M , where M is a finite quantity ., IMPLICIT & EXPLICIT FUNCTION :, A function defined by an equation not solved for the dependent variable is called an, IMPLICIT FUNCTION . For eg. the equation x3 + y3 = 1 defines y as an implicit function. If y has been, expressed in terms of x alone then it is called an EXPLICIT FUNCTION., INVERSE OF A FUNCTION : Let f : A → B be a one−one & onto function, then their exists, a unique function g : B → A such that f(x) = y ⇔ g(y) = x, ∀ x ∈ A & y ∈ B . Then g is said to, be inverse of f . Thus g = f−1 : B → A = {(f(x), x) (x, f(x)) ∈ f} ., PROPERTIES OF INVERSE FUNCTION :, (i), The inverse of a bijection is unique ., If f : A → B is a bijection & g : B → A is the inverse of f, then fog = IB and gof = IA , where IA & IB are, identity functions on the sets A & B respectively., Note that the graphs of f & g are the mirror images of each other in the line y = x . As shown, in the figure given below a point (x ',y ' ) corresponding to y = x2 (x >0) changes to (y ',x ' ) corresponding, , .IN, FO, , Note : (i), , (i), (ii), , 12., , (ii), , to y = + x , the changed form of x = y ., , (iii), (iv), 13., , The inverse of a bijection is also a bijection ., If f & g two bijections f : A → B , g : B → C then the inverse of gof exists and (gof)−1 = f−1o g−1, ODD & EVEN FUNCTIONS : If f (−x) = f (x) for all x in the domain of ‘f’ then f is said to be an, even function. e.g. f (x) = cos x ; g (x) = x² + 3 . If f (−x) = −f (x) for all x in the domain of ‘f’ then f is said, to be an odd function. e.g. f (x) = sin x ; g (x) = x3 + x ., NOTE : (a), f (x) − f (−x) = 0 => f (x) is even & f (x) + f (−x) = 0 => f (x) is odd ., (b), A function may neither be odd nor even .(c)Inverse of an even function is not defined, (d), Every even function is symmetric about the y−axis & every odd function is symmetric about the, origin .
Page 14 :
(e), , Every function can be expressed as the sum of an even & an odd function., , P−2, , f ( x) + f ( − x ) f ( x ) − f ( − x ), +, e.g. f ( x) =, 2, 2, , (f) only function which is defined on the entire number line & is even and odd at the same time is f(x)= 0., (g), If f and g both are even or both are odd then the function f.g will be even, but if any one of them is odd then f.g will be odd ., 14., PERIODIC FUNCTION : A function f(x) is called periodic if there exists a positive, number T (T > 0) called the period of the function such that f (x + T) = f(x), for all values of x within, the domain of x e.g. The function sin x & cos x both are periodic over 2π & tan x is periodic over π, NOTE : (a), f (T) = f (0) = f (−T) , where ‘T’ is the period ., (b), Inverse of a periodic function does not exist .www.MathsBySuhag.com , www.TekoClasses.com, (c), Every constant function is always periodic, with no fundamental period ., , 1, and, f (x ), , (f), if f(x) has a period T then f(ax + b) has a period T/a (a > 0) ., GENERAL : If x, y are independent variables, then :, (i), f(xy) = f(x) + f(y) ⇒ f(x) = k ln x or f(x) = 0 ., (ii), f(xy) = f(x) . f(y) ⇒ f(x) = xn , n ∈ R(iii) f(x + y) = f(x) . f(y), (iv), f(x + y) = f(x) + f(y) ⇒ f(x) = kx, where k is a constant ., , (i) sin−1 x + cos−1 x =, , ⇒ f(x) = a ., , y=, , (iv), , y = cosec−1 x where x ≤ − 1 or x ≥ 1 ; −, , (v), , y = sec−1 x where x ≤ −1 or x ≥ 1 ; 0 ≤ y ≤ π ; y ≠, , π, π, , y ≠ 0 and cosec y = x, ≤y≤, 2, 2, π, 2, , and sec y = x ., , (vi), y = cot−1 x where x ∈ R , 0 < y < π and cot y = x ., THAT : (a), 1st quadrant is common to all the inverse functions ., (b), 3rd quadrant is not used in inverse functions ., 4th quadrant is used in the, , CLOCKWISE DIRECTION, , i.e. −, , π, ≤y≤0 ., 2, , PROPERTIES OF INVERSE CIRCULAR FUNCTIONS :, (i) sin (sin−1 x) = x , −1 ≤ x ≤ 1, (ii) cos (cos−1 x) = x , −1 ≤ x ≤ 1, (iii) tan (tan−1 x) = x , x ∈ R, (v) cos−1 (cos x) = x ; 0 ≤ x ≤ π, , (iv) sin−1 (sin x) = x , − π ≤ x ≤ π, 2, , (vi) tan−1 (tan x) = x ; −, , π, 2, , tan−1 x − tan−1y = tan−1, , 2, , π, π, <x<, 2, 2, , π, 2, , x∈R, , x ≥ 1www.MathsBySuhag.com , www.TekoClasses.com, , x+y, 1 − xy, , = π + tan−1, , N, , AI, , π, π, and tan y = x ., where x ∈ R ; − < x <, 2, 2, , (iii), , (c), 3., P−1, , tan−1 x + tan−1 y = tan−1, , where x > 0 , y > 0 & xy < 1, , x+y, 1 − xy, , x−y, 1 + xy, , where x > 0 , y > 0 & xy > 1, , where x > 0 , y > 0, , 2, 2, sin−1 x + sin−1 y = sin−1 x 1 − y + y 1 − x where x ≥ 0 ,y≥0 & (x2 + y2) ≤ 1, , ⇒ 0 ≤ sin−1 x + sin−1 y ≤, , π, 2, , P−7, , [, , ], , sin–1x – sin–1y = sin −1 x 1 − y 2 − y 1 − x 2 where x > 0 , y > 0, , (iv), , cos−1 x + cos−1 y = cos−1 x y ∓ 1− x 2 1− y 2, , [, , ], , where x ≥ 0 , y ≥ 0, , x + y + z − xy z , , If tan−1 x + tan−1 y + tan−1 z = tan−1 1 − x y − y z − z x if, x >0,y>0,z>0 & xy+yz+zx<1, , , Note : (i), (ii), P−8, , π, < sin−1 x + sin−1 y < π, 2, , ⇒, , (iii), , y = cos−1 x where −1 ≤ x ≤ 1 ; 0 ≤ y ≤ π and cos y = x ., tan−1 x, , x ≤ −1 , x ≥ 1, , ; x<0, , (ii) tan−1 x + cot−1 x =, , −1 ≤ x ≤ 1, , Note that : x2 + y2 >1, , M, , NOTE, , JE, E, , (ii), , and sin y = x ., , ;, , 2, 2, (ii) sin−1 x + sin−1 y = π − sin−1 x 1 − y + y 1 − x where x≥0,y ≥ 0 & x2 + y2 > 1, , kx, , GENERAL DEFINITION(S):1. sin−1 x , cos−1 x , tan−1 x etc. denote angles or real numbers whose sine, is x , whose cosine is x and whose tangent is x, provided that the answers given are numerically, smallest available . These are also written as arc sinx , arc cosx etc ., If there are two angles one positive & the other negative having same numerical value, then, positive angle should be taken ., 2., PRINCIPAL VALUES AND DOMAINS OF INVERSE CIRCULAR FUNCTIONS :(i)y = sin−1 x, where −1 ≤ x ≤ 1 ;, , π, 2, , (iii) cosec−1 x + sec−1 x =, , (i), , 1, x, , sin−1 (−x) = − sin−1 x, , −1 ≤ x ≤ 1, (ii), tan−1 (−x) = − tan−1 x, , x∈R, −, 1, −, 1, −, 1, −, 1, cos (−x) = π − cos x , −1 ≤ x ≤ 1(iv) cot (−x) = π − cot x , x ∈ R, , P−4, , P−5, , 1, x, , = π + tan−1, , ; x>0, , Note that : x2 + y2 ≤ 1, , 10.INVERSE TRIGONOMETRY FUNCTION, , π, π, − ≤y≤, 2, 2, , 1, x, , (i), (iii), , P−6, , f (x) also has a period p ., , (iii) cot−1 x = tan−1, , x ≤ −1 , x ≥ 1 (ii) sec−1 x = cos−1, , ;, , .IN, FO, , 15., , If f(x) has a period p, then, , 1, x, , P−3, , (d), If f (x) has a period T & g (x) also has a period T then it does not mean that f (x) + g (x) must, have a period T . e.g. f (x) = sinx + cosx., (e), , (i) cosec−1 x = sin−1, , If, , +, , tan−1 y, , +, , , , tan−1 z, , = π then x + y + z = xyz, , If tan−1 x + tan−1 y + tan−1 z =, , 2 tan−1 x = sin−1, , 2x, sin−1, =, 1 + x2, , tan−1 x, , π, then xy + yz + zx = 1, 2, , 2, 2x, −1 1 − x = tan−1 2 x, =, cos, 1 + x2, 1 + x2, 1 − x2, , 2 tan −1 x, , −1, π − 2 tan x, − π + 2 tan −1 x, , , (, , 2tan −1 x, , 2x, tan−1, = π+ 2tan −1 x, 1 − x2, − π−2tan −1 x, , , (, , REMEMBER THAT :, , (i), , ), , x ≤1, 2 tan −1 x, if x ≥ 0, 1 − x2, x > 1 cos−1, =, , −1, 2, 1+ x, − 2 tan x if x < 0, x < −1, , if, if, if, , ), , Note very carefully that :, , if, , x <1, , if, , x < −1, , if, , x >1, , sin−1 x + sin−1 y + sin−1 z =, , (ii), , cos−1 x + cos−1 y + cos−1 z = 3π, , (iii), , tan−1 1 + tan−1 2 + tan−1 3 = π, , ⇒, , 3π, 2, , ⇒, , x=y=z=1, , x = y = z = −1, , and tan−1 1 + tan−1 21 + tan−1 13 = π2
Page 15 :
INVERSE TRIGONOMETRIC FUNCTIONS, SOME USEFUL GRAPHS, 1., , , y = sin −1 x , x ≤ 1 , y ∈ − 2, , π, , , , ,, , π, , 2., , 2, , , y = cos −1 x , x ≤ 1 , y ∈ [0 , π], , 9. (a) y = tan (tan −1 x) , x ∈ R , y ∈ R , y is aperiodic 9. (b)y = tan −1 (tan x) ,, =x, = x, π, π π, , , x ∈ R − (2 n − 1) 2 n ∈ I , y ∈ − 2 , 2 , periodic with period π, , y = tan −1 x , x ∈ R ,, , , , , y ∈ −, , π, 2, , ,, , π, , , , 4., , 2, , y = cot −1 x , x ∈ R , y ∈ (0 , π), , 10. (a) y = cot −1 (cot x) ,, = x, x ∈ R − {n π} , y ∈ (0 , π) , periodic with π, , .IN, FO, , 3., , π, π, y = sec −1 x , x ≥ 1 , y ∈ 0 , 2 ∪ 2, , , ,π, , , , , 6. y = cosec −1 x , x ≥ 1 ,, , π, , π , y ∈ − , 0 ∪ 0 , , , , 2, 2, , , y = cosec (cosec −1 x) ,, = x, x ≥ 1 , y ≥ 1,, y is aperiodic, , 11. (b), , π, ∪ 0 , , 2, , 7. (a) y = sin −1 (sin x) , x ∈ R ,, , π π, y ∈ − , ,, 2 2, , Periodic with period 2 π, aperiodic, , 8. (a) y = cos −1(cos x), x ∈ R, y ∈[0, π],, = x periodic with period 2 π, , 7.(b), , JE, E, , M, , 5., , AI, , N, , 11. (a) y = cosec −1 (cosec x),, = x, π , x ε R − { nπ , n ε I }, y ∈ − 2 , 0, , y is periodic with period 2 π, , 10. (b) y = cot (cot −1 x) ,, = x, x ∈ R , y ∈ R , y is aperiodic, , y = sin (sin −1 x) ,, , = x x ∈ [− 1 , 1] , y ∈ [− 1 , 1] , y is, , 12. (a) y = sec −1 (sec x) ,, = x, y is periodic with period 2π ;, π, π, π, , , x ∈ R – (2 n − 1) 2 n ∈ I y ∈ 0 , 2 ∪ 2, , , 8. (b) y = cos (cos −1 x) ,, = x, x ∈ [− 1 , 1] , y ∈ [− 1 , 1], y is aperiodic, , , , , , ,π, , , , , 12. (b) y = sec (sec −1 x) ,, = x, x ≥ 1 ; y ≥ 1], y is aperiodic
Page 16 :
11. Limit and Continuity, & Differentiability of Function, , (v) cos x = 1 −, , (viii) sin-1x = x +, , THINGS TO REMEMBER :, 1., , Limit, Limit of a function f(x) is said to exist as, x→a when Limit, x → a − f(x) = x → a + f(x) = finite quantity.., , 2., , FUNDAMENTAL THEOREMS ON LIMITS :, , 1., , (ii) Limit, f(x). g(x) = l. m, x→ a, , Limit, , (iii), , Limit f (x) = � , provided m ≠ 0www.MathsBySuhag.com , www.TekoClasses.com, x → a g (g), m, , (iv), , Limit k f(x) = k Limit f(x) ; where k is a constant., x→ a, x→ a, , (v), , Limit f [g(x)] = f Limit g (x) = f (m) ; provided f is continuous at g (x) = m., x→ a, x→a, , , 2., (i), , Limit f(x) does not exist, , (ii), (iii), , x, , Limit, Limit (1 + x)1/x = e= Limit 1 + 1 note however the re Limit, h → 0 (1 - h )n = 0and h → 0 (1 + h )n → ∞, , x→ 0, x→∞ , n→∞, n→∞, x, , , , Limit φ( x )[f ( x )−1], Limit f(x) = 1 and Limit φ (x) = ∞ , then ; Limit, φ( x ), x →a, x→ a, [, f, (, x, ), ], =, e, x→ a, x →a, , (d), , If, , Limit f(x) = A > 0 & Limit φ (x) = B (a finite quantity) then ;, x→ a, x→ a, , N, , If, , SQUEEZE PLAY THEOREM :, , M, , 4., , (a), , JE, E, , (e), , x, n, n, x, Limit a − 1 = 1n a (a > 0). In particular Limit e −1 = 1 (f) Limit x − a = n a n −1, x →0, x →0, x →a, x, x, x−a, , AI, , Limit [f(x)] φ(x) = ez where z = Limit φ (x). ln[f(x)] = eBlnA = AB, x→ a, x→ a, , 0 ∞, ,, , 0 x ∞ , 0° , ∞° , ∞ − ∞ and 1∞, 0 ∞, , Note :, (i), We cannot plot ∞ on the paper. Infinity (∞) is a symbol & not a number. It does not obey the laws, of elementry algebra., (ii), ∞+∞=∞, (iii), ∞ × ∞ = ∞ (iv) (a/∞) = 0 if a is finite, 6., (a), (c), (d), , The following strategies should be born in mind for evaluating the limits:, Factorisation, (b), Rationalisation or double rationalisation, Use of trigonometric transformation ;, appropriate substitution and using standard limits, Expansion of function like Binomial expansion, exponential & logarithmic expansion, expansion of sinx, , cosx , tanx should be remembered by heart & are given below :, , (i) a x = 1 +, , 2, , 3, , 3, , 2, , 3, , x 1n a x 1n a x 1n a, x x, x, +, +............, +, +, +......... a > 0 (ii) e x = 1 + +, 1, !, 2!, 3!, 1!, 2!, 3!, , (iii) ln (1+x) = x −, , 2, , 3, , 4, , 3, , 5, , 7, , x, x, x, x, x, x, +, −, +......., + −, +......... for − 1 < x ≤ 1 (iv) sin x = x −, 3! 5! 7!, 2, 3, 4, , x →c, , In case Limit f(x) exists but is not equal to f(c) then the function is said to have a removable discontinuity, x →c, , or discontinuity of the first kind. In this case we can redefine the function such that Limit f(x) = f(c) &, x →c, , make it continuous at x= c. Removable type of discontinuity can be further classified as :, , M IS SING P OI NT D ISCO NTIN UITY : Where Limit f(x) exists finitely but f(a) is no t defined., x →a, , e.g. f(x) =, , (b), , ISOLATED POINT DISCONTINUITY : Where Limit f(x) exists & f(a) also exists but ; Limit ≠ f(a). e.g. f(x), x →a, , =, , a, is not defined , if a ≠ 0. (vi)a b = 0 , if & only if a = 0 or b = 0 and a & b are finite., 0, , 2, , f(x) is not defined at x= c, Limit f(x) ≠ f (c), , sin x, (1 − x )(9 − x 2 ), has a missing point discontinuity at x = 1 , and f(x) =, has a missing point, x, (1 − x ), discontinuity at x = 0, , Limit, Limit, If f(x) ≤ g(x) ≤ h(x) ∀ x & Limit, x → a f(x) = l = x → a h(x) then x → a g(x) = l., , INDETERMINANT FORMS :, , x →c, , Geometrically, the graph of the function will exhibit a break at x= c., The graph as shown is discontinuous at x = 1 , 2 and 3., 3., Types of Discontinuities :, Type - 1: ( Removable type of discontinuities), , x, , (c), , (v), , x →c, , .IN, FO, , −1, −1, Limit sinx = 1 = Limit tan x = Limit tan x = Limit sin x [ Where x is measured in radians ], x→ 0, x→ 0, x→ 0, x→ 0, , x, , h →0, , i.e. LHL at x = c = RHL at x = c equals Value of ‘f’ at x = c., It should be noted that continuity of a function at x = a is meaningful only if the function is defined in the, immediate neighbourhood of x = a, not necessarily at x = a., Reasons of discontinuity:www.MathsBySuhag.com , www.TekoClasses.com, , x →c, , (a), , 5., , x →c, , i.e. Limit, f(x) ≠ Limit f (x), −, +, , STANDARD LIMITS :, , (b), , A funct ion f(x) is said to be co ntinuous at x = c, if Limit f(x) = f(c). Symbolically, h →0, , 3., , x, , x 2 5x 4 61x 6, +, +, +......, 2!, 4!, 6!, , f is continuous at x = c if Limit f(c - h) = Limit f(c+h) = f(c)., , , , Limit f (x) l n l (l > 0)., For example Limit, x → a l n (f(x) = l n x → a, , , , x, , (ix) sec-1x = 1 +, , THINGS TO REMEMBER :, , (i), , f (x) ± g (x) = l ± m, , 12 3 12 .32 5 12 .32 .52 7, x +, x +, x +......., 3!, 5!, 7!, , (CONTINUITY), , Limit, Let Limit, x→ a f (x) = l & x→ a g (x) = m. If l & m exists then :, x→ a, , x2 x 4 x6, x 3 2x 5, x3 x5 x7, +, −, +...... (vi) tan x = x +, +, +........ (vii)tan-1x = x −, +, −, +......., 2! 4 ! 6 !, 3, 15, 3, 5, 7, , x →a, , x 2 − 16, , x ≠ 4 & f (4) = 9 has an isolated point discontinuity at x = 4., x−4, , 0 if x ∈ I, , Similarly f(x) = [x] + [ –x] = , has an isolated point discontinuity at all x ∈ I., −1 if x ∉ I, , Type-2: ( Non - Removable type of discontinuities), In case Limit f(x) does not exist then it is not possible to make the function continuous by redefining it., x →c, , Such discontinuities are known as non - removable discontinuity oR, discontinuity of the 2nd kind. Non-removable type of discontinuity can be further classified as :, , (a), , Finite discontinuity e.g. f(x) = x − [x] at all integral x ; f(x) = tan −1, note that f(0+) = 0 ; f(0–) = 1 ), , 1, at x = 0 and f(x) =, x, , 1, 1, 1+2 x, , at x = 0 (
Page 17 :
(b), , Infinite discontinuity e.g. f(x) =, , cosx, π, 1, 1, at, at x = 4 ; f(x) = 2tanx at x = and f(x) =, or g(x) =, 2, x, 2, ( x − 4), x−4, , x = 0., , (c), , Oscillatory discontinuity e.g. f(x) = sin 1 at x = 0., x, In all these cases the value of f(a) of the function at x= a (point of discontinuity) may or may not exist but, Limit does not exist., , (ii), 8., , open interval (a , b)., If K is any real number between f(a) & f(b), then there exists at least one solution of the equation f(x) = K, in the open inetrval (a , b)., SINGLE POINT CONTINUITY:, Functions which are continuous only at one point are said to exhibit single point continuity, e . g ., , f ( x ), , =, , x if x ∈Q, x if x ∈Q, and g(x) =, are both continuous only at x = 0., 0 if x ∉Q, − x if x ∉Q, , x →a, , 5., 6., , f (x), Further, if g (c) is not zero, thenF4(x) =, is also continuous atx= c., g(x), , sin πx, 0, , x=0, , If f(x) and g(x) both are discontinuous at x = a then the product function φ(x) = f(x). g(x) is not necessarily, 1, , be discontinuous at x = a. e.g.f(x) = − g(x) = , −1, , (c), (d), (e), , x≠0, , x≥0, x<0, , JE, E, , (b), , (i), , (ii), , x sin x, x +2, 2, , f (a − h )−f (a ), , Provided the limit exists & is finite., −h, We also write f ′(a+) = f ′+(a) & f ′(a–) = f ′_(a)., * This geomtrically means that a unique tangent with finite slope can be drawn at x = a as shown in the, figure.www.MathsBySuhag.com , www.TekoClasses.com, , & g(x) = x are continuous at x = 0 , hence the composite (gof) (x) =, , x sin x, x2 + 2, , (iii), , Derivability & Continuity :, (a), If f ′(a) exists then f(x) is derivable at x= a ⇒ f(x) is continuous at x = a., (b), If a function f is derivable at x then f is continuous at x., f ( x + h )−f ( x ), For : f ′(x) = Limit, exists., h →0, h, , Also f ( x + h )−f ( x ) =, , Point functions are to be treated as discontinuous. eg. f(x) = 1−x + x−1 is not continuous at x = 1., A Continuous function whose domain is closed must have a range also in closed interval., If f is continuous at x = c & g is continuous at x = f(c) then the composite g[f(x)] is continuous at x = c. eg., , f(x) =, , f (a + h )−f (a ), ,, h, provided the limit exists & is finite.www.MathsBySuhag.com , www.TekoClasses.com, The left hand derivative : of f at x = a denoted by, , f ' (a+) = Limit, h →0 +, , N, , The intermediate value theorem:, Suppose f(x) is continuous on an interval I , and a and b are any two points of I. Then if y0 is a number, between f(a) and f(b) , their exists a number c between a and b such that f(c) = y0 . N OT E V E RY, CAREFULLY THAT :www.MathsBySuhag.com , www.TekoClasses.com, If f(x) is continuous & g(x) is discontinuous, at x = a then the product function φ(x) = f(x). g(x), is not necessarily be discontinuous at x = a. e.g. f(x) = x & g(x) = , , f (a + h )−f (a ), if it exist, h, The right hand derivative of f ′ at x = a, denoted by f ′(a+) is defined by :, , f ′(a) = Limit, h →0, , AI, , (a), , THINGS TO REMEMBER :, 1. Right hand & Left hand Derivatives ; By definition:, , f ′(a+) is defined by : f ' (a–) = Limit, h →0 +, , M, , 7., , DIFFERENTIABILITY, , .IN, FO, , 4., , Note: From the adjacent graph note that, – f is continuous at x = – 1, – f has isolated discontinuity at x = 1, – f has missing point discontinuity at x = 2, – f has non removable (finite type), discontinuity at the origin., In case of dis-continuity of the second kind the non-negative difference between the value of the RHL at, x = c & LHL at x = c is called THE JUMP OF DISCONTINUITY. A function having a finite number of jumps in, a given interval I is called a PIECE WISE CONTINUOUS or SECTIONALLY CONTINUOUS function in this interval., All Polynomials, Trigonometrical functions, exponential & Logarithmic functions are continuous in their, domains., If f & g are two functions that are continuous at x= c then the functions defined by :, F1(x) = f(x) ± g(x) ; F2(x) = K f(x) , K any real number ; F3(x) = f(x).g(x) are also continuous at x= c., , will also be, , 7., (a), , continuous at x = 0 .www.MathsBySuhag.com , www.TekoClasses.com, CONTINUITY IN AN INTERVAL :, A function f is said to be continuous in (a , b) if f is continuous at each & every point ∈(a,b)., , (b), (i), , A function f is said to be continuous in a closed interval [a , b] if :, f is continuous in the open interval (a , b), &, , (ii), , f is right continuous at ‘a’ i.e. Limit, f(x) = f(a) = a finite quantity.., x →a +, , (iii), , f is left continuous at ‘b’ i.e. Limit, f(x) = f(b) = a finite quantity.., x →b −, , (i), , Note that a function f which is continuous in [a , b] possesses the following properties :, If f(a) & f(b) possess opposite signs, then there exists at least one solution of the equation f(x) = 0 in the, , Therefore :, , f ( x + h ) −f ( x ), .h [h ≠ 0], h, , [f ( x + h )−f ( x )] = Limit, h →0, , f ( x + h ) −f ( x ), .h =f '( x ).0=0, h, , Limit f (x+h) = f(x) ⇒ f is continuous at x., Therefore Limit, h →0 [f ( x + h )−f ( x )] = 0 ⇒ h →0, , Note : If f(x) is derivable for every point of its domain of definition, then it is continuous in that domain., The Converse of the above result is not true :, “ IF f IS CONTINUOUS AT x , THEN f IS DERIVABLE AT x ” IS NOT TRUE., e.g. t he functions f(x) = x & g(x) = x sin 1 ; x ≠ 0 & g(0) = 0 are continuous at, x, x = 0 but not derivable at x = 0., NOTE CAREFULLY :, (a), Let f ′+(a) = p & f ′_(a) = q where p & q are finite then :, (i), p = q ⇒ f is derivable at x = a ⇒ f is continuous at x = a., (ii), p ≠ q ⇒ f is not derivable at x = a., It is very important to note that f may be still continuous at x = a., In short, for a function f :, Differentiability ⇒ Continuity, ;, Continuity ⇒, / derivability ;
Page 18 :
3., , (i), (ii), NOTE, 1., 2., 3., 4., 5., , x 2 sin x1, , e.g. f(x) = , , 0, , 6., , A surprising result : Suppose that the function f (x) and g (x) defined in the interval (x1, x2) containing, the point x0, and if f is differentiable at x = x0 with f (x0) = 0 together with g is continuous as x = x0 then, the function F (x) = f (x) · g (x) is differentiable at x = x0, e.g. F (x) = sinx · x2/3 is differentiable at x = 0., , N, , JE, E, , h, , f (x + h) − f (x), have therefore , f ′(x) = Limit, h→ 0, h, , The derivative of a given function f at a point x = a of its domain is defined as :, Limit f (a + h) − f (a ) , provided the limit exists & is denoted by f ′(a) ., h→ 0, , 7., , dx, , 8., , h, , f (x) − f (a ), Note that alternatively, we can define f ′(a) = Limit, , provided the limit exists., x→ a, x−a, , 3., , DERIVATIVE OF f(x) FROM THE FIRST PRINCIPLE /ab INITIO METHOD:, f (x + δ x) − f (x), δy, dy, = f ′(x) =, If f(x) is a derivable function then, Limit, = Limit, δ x→ 0, δ x→ 0, δx, δx, , 4., , (v), , If y = f(u) & u = g(x) then, , where v ≠ 0 known as “ QUOTIENT RULE ”, , v2, , dy dy du, =, ., dx du dx, , “ CHAIN RULE ”, , DERIVATIVE OF STANDARDS FUNCTIONS :, (i) D (xn) = n.xn−1 ; x ∈ R, n ∈ R, x > 0, 1, x, , (ii) D (ex) = ex, 1, x, , (iii) D (ax) = ax. ln a a > 0, , (iv) D (ln x) =, , (vi) D (sinx) = cosx, (ix) D (secx) = secx . tanx, , (vii) D (cosx) = − sinx, (viii) D = tanx = sec²x, (x) D (cosecx) = − cosecx . cotx, , (xi) D (cotx) = − cosec²x, , (xii) D (constant) = 0 where D =, , (v) D (logax) =, , logae, , d, dx, , INVERSE FUNCTIONS AND THEIR DERIVATIVES :, (a), Theorem : If the inverse functions f & g are defined by y = f(x) & x = g(y) & if f ′(x) exists &, f ′(x) ≠ 0 then g ′(y) =, , AI, M, , DEFINITION :, If x and x + h belong to the domain of a function f defined by y = f(x), then, , Limit f (x + h) − f (x) if it exists , is called the DERIVATIVE of f at x & is denoted by f ′(x) or dy . We, h→ 0, , 2., , 6., , d u v, =, dx v, , dy, 1, . This result can also be written as, if, exists &, dx, f ′ (x), , dy, ≠ 0 , then, dx, , dx dx, dx, dy dx, dy, dy , ., ≠ 0], = 1 / or, = 1 or, =1 / [, dx , dy, dx dy, dx, dy dy, , if x ≠ 0, if x = 0, , 12. DIFFERENTIATION, & L' HOSPITAL RULE, 1., , 5., , ( dudx ) − u ( dvdx ), , (iv), , .IN, FO, , (b), , Non derivibality ⇒, But discontinuity ⇒ Non derivability, / discontinuous ;, If a function f is not differentiable but is continuous at x = a it geometrically implies a sharp corner at, x = a., DERIVABILITY OVER AN INTERVAL :, f (x) is said to be derivable over an interval if it is derivable at each & every point of the interval f(x) is said, to be derivable over the closed interval [a, b] if :, for the points a and b, f ′(a+) & f ′(b −) exist &, for any point c such that a < c < b, f ′(c+) & f′(c −) exist & are equal., :, If f(x) & g(x) are derivable at x = a then the functions f(x) + g(x), f(x) − g(x) , f(x).g(x), will also be derivable at x = a & if g (a) ≠ 0 then the function f(x)/g(x) will also be derivable at x = a., If f(x) is differentiable at x = a & g(x) is not differentiable at x = a , then the product function F(x) = f(x)., g(x) can still be differentiable at x = a e.g. f(x) = x & g(x) = x., If f(x) & g(x) both are not differentiable at x = a then the product function ;, F(x) = f(x). g(x) can still be differentiable at x = a e.g. f(x) = x & g(x) = x., If f(x) & g(x) both are non-deri. at x = a then the sum function F(x) = f(x) + g(x) may be a differentiable, function. e.g. f(x) = x & g(x) = −x.www.MathsBySuhag.com , www.TekoClasses.com, If f(x) is derivable at x = a ⇒, / f ′(x) is continuous at x = a.www.MathsBySuhag.com , www.TekoClasses.com, , dx, , 9., , d, du dv, ±, (u ± v) =, dx, dx dx, , (iii), , d, dv, du, u . v) = u, ±v, (, dx, dx, dx, , (ii), , d, du, (K u ) = K, , where K is any constant, dx, dx, , known as “ PRODUCT RULE ”, , Results :, , (i), , D (sin −1 x) =, , (iii), , D (tan −1 x) =, , (v), , 1, 1− x, 1, 1+ x, , 2, , 2, , , − 1< x < 1, , , x ∈R, , x, , D (cos −1 x) =, , (iv), , D (sec −1 x) =, , 10., , x −1, 2, , , x >1, , Note : In general if y = f(u) then, , 1 − x2, , (vi), , D (cot −1 x ) =, , , − 1< x < 1, , 1, x2 − 1, , −1, 1 + x2, , , x >1, , , x∈R, , du, dy, ., = f ′(u) ., dx, dx, , LOGARITHMIC DIFFERENTIATION : To find the derivative of :, (i), a function which is the product or quotient of a number of functions, OR, g(x), (ii), a function of the form [f(x)] where f & g are both derivable, it will be found convinient to take, the logarithm of the function first & then differentiate. This is called L OGARITHMIC, DIFFERENTIATION., IMPLICIT DIFFERENTIATION : φ (x , y) = 0, (i), In order to find dy/dx, in the case of implicit functions, we differentiate each term w.r.t. x, regarding y as a functions of x & then collect terms in dy/dx together on one side to finally find, dy/dx.www.MathsBySuhag.com , www.TekoClasses.com, (ii), In answers of dy/dx in the case of implicit functions, both x & y are present ., PARAMETRIC DIFFERENTIATION :, dy d y / d θ, ., =, dx d x / d θ, , DERIVATIVE OF A FUNCTION W.R.T. ANOTHER FUNCTION :, dy, , 11., , −1, , x, −1, , D (cos ec −1x) =, , (ii), , If y = f(θ) & x = g(θ) where θ is a parameter , then, , THEOREMS ON DERIVATIVES :, If u and v are derivable function of x, then,, (i), , (b), , dy / dx, , f '(x), , Let y = f(x) ; z = g(x) then d z = d z / d x = g' (x) ., DERIVATIVES OF ORDER TWO & THREE :, Let a function y = f(x) be defined on an open interval (a, b). It’s derivative, if it exists on, (a, b) is a certain function f ′ (x) [or (dy/dx) or y ] & is called the first derivative, of y w.r.t. x.If it happens that the first derivative has a derivative on (a , b) then this derivative is called the, second derivative of y w. r. t. x & is denoted by f ′′(x) or (d2y/dx2) or y ′′.Similarly, the 3rd order
Page 19 :
d 3y, , d d2y , , derivative of y w. r. t. x , if it exists, is defined by d x 3 = dx d x 2 , , , f (x), , 12., , g(x), , (iii), , h (x ), , If F(x)= l(x) m(x) n(x) ,where f ,g,h,l,m,n,u,v,w are differentiable functions of x then, u (x ), , v(x), , f (x) g(x) h(x), l' (x) m'(x) n'(x), u(x) v(x) w(x), , +, , +, , f (x) g(x) h(x), l(x) m(x) n(x), u'(x) v'(x) w' (x), , x→ a, , x→ a, , 2, , (b), , Both f(x) & g(x) are continuous at x = a, , (iii), (iv), , Both f(x) & g(x) are differentiable at x = a, &, Both f ′(x) & g ′(x) are continuous at x = a , Then, , &, , (i), , 2 tan −1 x, , 2x , y = f(x) = sin−1 , = π − 2 tan −1 x, 2, 1 + x , − π + 2 tan −1 x, , , (IV), , ), , x < −1, , (c), , (d), ii), , AI, , π, , M, , range is − 2 , 2 , , , f is continuous for, all x but not diff., at x = 1 , - 1, 22, for, 1+ x, dy, = non existent for, dx, − 2, for, 1 + x 2, , x <1, x =1, x >1, , I in (- 1 , 1) & D in (- ∞ , - 1) ∪ (1 , ∞), , Consider, , 1 − x2 , 2 tan −1 x, , =, , −1, 1 + x2 , − 2 tan x, , y = f (x) = cos-1 , , HIGHLIGHTS :, (a), Domain is x ∈ R &, range is [0, π), (b), Continuous for all x, but not diff. at x = 0, 22, for x > 0, 1+ x, dy, (c), = non existent for x = 0, dx, − 2, for x < 0, 1 + x 2, , (d), , x =1, , (e), , − π + 3 sin −1 x, , y = f (x) = sin−1 (3 x − 4 x3) = 3 sin −1 x, π − 3 sin −1 x, , , ), , It is bound for all x, , if, , − 1 ≤ x ≤ − 12, , if, if, , − 12 ≤ x ≤, 1, ≤x≤1, 2, , 1, 2, , π, , range is − 2 , 2 , , , , JE, E, , (b), , I ∀ x in its domain, , π, , x ≤1, x >1, , HIGHLIGHTS :, (a), Domain is x ∈ R &, π, , (d), , x ≠1, , HIGHLIGHTS :www.MathsBySuhag.com , www.TekoClasses.com, (a), Domain is x ∈ [− 1 , 1] &, , N, , (, , (c), , .IN, FO, , ANALYSIS AND GRAPHS OF SOME USEFUL FUNCTIONS :, , x >1, , (, , g"(x), , 14., , ), , f is neither continuous, nor diff. at x = 1 , - 1, 2, , Limit f (x) = Limit f '(x) = Limit f "(x) & soon till indeterminant form vanishes., x→ a, x→ a, x→ a, g'(x), , x < −1, , 2, , 2, dy, = 1+ x, dx, non existent, , x→ a, , (ii), , g(x), , (, , x <1, , range is − π , π , , , , L’ HOSPITAL’S RULE :www.MathsBySuhag.com , www.TekoClasses.com, If f(x) & g(x) are functions of x such that :, Limit f(x) = 0 = Limit g(x) OR Limit f(x) = ∞ = Limit g(x) and, (i), x→ a, , 2 tan −1 x, , 2x, −1, y = f (x) = tan-1, x, 2 = π + 2 tan, 1− x, − π − 2 tan −1 x, , , HIGHLIGHTS :, (a), Domain is R - {1 , -1} &, , w(x), , f '(x) g'(x) h' (x), F ′(x) = l(x) m(x) n(x), u(x) v(x) w(x), , 13., , It is also denoted by f ′′′(x) or y ′′′., , if x ≥ 0, if x < 0, , (v), , (b), , Not derivable at x =, , (c), , dy, 1 − x2, = , − 3, dx, , (d), , , , 3, , , , 1 − x2, , 1, 2, , if x ∈ ( − 12 ,, , 1, 2, , ), , if x ∈ ( − 1 , − 12 ) ∪ ( 12 , 1), , Continuous everywhere in its domain, , 3 cos −1 x − 2 π, , y = f (x) = cos-1 (4 x3 - 3 x) = 2 π − 3 cos −1 x, 3 cos −1 x, , , if, , − 1 ≤ x ≤ − 12, , if, if, , − 12 ≤ x ≤, 1, ≤x≤1, 2, , 1, 2, , HIGHLIGHTS :, (a), Domain is x ∈ [- 1 , 1] &, range is [0 , π], (b), , Continuous everywhere in its domain, but not derivable at x =, , (c), , (d), , 1, , 1 1, 2 2, , , , 3, , , , 1 − x2, , , , , , 1, , D in 2 , 1 ∪ − 1 , − 2 , , , I in − , &, , , 2, dy, = 1 − x3, dx, −, , 1, 1, ,−, 2, 2, , (, ), x ∈(−1 , − ) ∪ (, , if x ∈ − 12 ,, if, , 1, 2, , 1, 2, , 1, 2, , ), , ,1, , I in (0 , ∞) & D in (- ∞ , 0), , GENERAL NOTE :, Concavity in each case is decided by the sign of 2nd derivative as :
Page 20 :
d 2y, > 0 ⇒ Concave upwards, d x2, , D = DECREASING, , ;, , d 2y, <0 ⇒, d x2, , ;, , 'x' is equal to the derivative of 'y' w.r.t. 'x'., , MONOTONOCITY(Significance of the sign of the first order derivative), , Concave downwards, , I = INCREASING, , DEFINITIONS :, A function f (x) is called an Increasing Function at a point x = a if in a sufficiently small neighbourhood, 1., , 13. APPLICATION OF DERIVATIVE (AOD)., TANGENT & NORMAL, , around x = a we have, , THINGS TO REMEMBER :, The value of the derivative at P (x1 , y1) gives the slope of the tangent to the curve at P. Symbolically, I, dy , f′ (x1) = , dx x, , 1 y1, , II, , III, , Similarly decreasing if, , = Slope of tangent at P (x1 y1) = m (say)., , 2., , Equation of tangent at (x1, y1) is ;, , y − y1 =, , dy , , dx x, , y − y1 = −, , Equation of normal at (x1, y1) is ;, , (x − x1)., , 3., 4., , 1 y1, , 1, dy, d x x, , f (a + h) > f (a ) and , increasing;, f (a − h) < f (a ), , , (x − x1)., , Note : If f ′(a) = 0, then for x = a the function may be still increasing or it may be decreasing as shown. It has to, be identified by a seperate rule. e.g. f (x) = x3 is increasing at every point. Note that, dy/dx = 3 x²., , AI, , N, , NOTE :www.MathsBySuhag.com , www.TekoClasses.com, 1.The point P (x1 , y1) will satisfy the equation of the curve & the eqation of tangent & normal line., 2.If the tangent at any point P on the curve is // to the axis of x then dy/dx = 0 at the point P., 3.If the tangent at any point on the curve is parallel to the axis of y, then dy/dx = ∞ or dx/dy = 0., 4. If the tangent at any point on the curve is equally inclined to both the axes then dy/dx = ± 1., 5. If the tangent at any point makes equal intercept on the coordinate axes then dy/dx = – 1., 6., Tangent to a curve at the point P (x1, y1) can be drawn even through dy/dx at P does not exist. e.g. x = 0 is, a tangent to y = x2/3 at (0, 0)., 7., If a curve passing through the origin be given by a rational integral algebraic equation, the equation of the, tangent (or tangents) at the origin is obtained by equating to zero the terms of the lowest degree in the equation., e.g. If the equation of a curve be x2 – y2 + x3 + 3 x2 y − y3 = 0, the tangents at the origin are given by x2 –, y2 = 0 i.e. x + y = 0 and x − y = 0., IV, Angle of intersection between two curves is defined as the angle between the 2 tangents drawn to the 2, curves at their point of intersection. If the angle between two curves is 90° every where then they are, called ORTHOGONAL curves., , A differentiable function is called increasing in an interval (a, b) if it is increasing at every point within the, interval (but not necessarily at the end points). A function decreasing in an interval (a, b) is similarly, defined.www.MathsBySuhag.com , www.TekoClasses.com, A function which in a given interval is increasing or decreasing is called “Monotonic” in that interval., Tests for increasing and decreasing of a function at a point :, If the derivative f ′(x) is positive at a point x = a, then the function f (x) at this point is increasing. If it is, negative, then the function is decreasing. Even if f ' (a) is not defined, f can still be increasing or decreasing., , .IN, FO, , 1 y1, , f (a + h) < f (a ) and , decreasing., f (a − h) > f (a ), , , V, , (a) Length of the tangent (PT) =, , y1 1 + [f ′( x1 )]2, , (b) Length of Subtangent (MT) =, , f ′( x1 ), y1, , f ′( x1 ), , JE, E, , M, , 5., , (c) Length of Normal (PN) = y1 1 + [f ′( x1 )]2, (d) Length of Subnormal (MN) = y1 f ' (x1), , General Note :, (1), If a function is invertible it has to be either increasing or decreasing., (2), If a function is continuous the intervals in which it rises and falls may be separated by points at which its, derivative fails to exist., (3), If f is increasing in [a, b] and is continuous then f (b) is the greatest and f (c) is the least value of f in [a,, b]. Similarly if f is decreasing in [a, b] then f (a) is the greatest value and f (b) is the least value., 6., , DIFFERENTIALS :, The differential of a function is equal to its derivative multiplied by the differential of the independent, variable. Thus if, y = tan x then dy = sec2 x dx., In general dy = f ′ (x) d x., Note that : d (c) = 0 where 'c' is a constant., d (u + v − w) = du + dv − dw, d (u v) = u d v + v d u, , (i), (ii), (iii), , Note :, 1., For the independent variable 'x' , increment ∆ x and differential d x are equal but this is not the case with, the dependent variable 'y' i.e. ∆ y ≠ d y., dy, 2., The relation d y = f ′ (x) d x can be written as, = f ′ (x) ; thus the quotient of the differentials of 'y' and, dx, , (b), , VI, , Tests for Increasing & Decreasing of a function in an interval :, SUFFICIENCY TEST : If the derivative function f ′(x) in an interval (a , b) is every where positive, then the, function f (x) in this interval is Increasing ;www.MathsBySuhag.com , www.TekoClasses.com, If f ′(x) is every where negative, then f (x) is Decreasing., , (i), (ii), (iii), , (a), ROLLE'S THEOREM :, Let f(x) be a function of x subject to the following conditions :, f(x) is a continuous function of x in the closed interval of a ≤ x ≤ b., f ′ (x) exists for every point in the open interval a < x < b., f (a) = f (b). Then there exists at least one point x = c such that a<c < b where f ′ (c) = 0., Note that if f is not continuous in closed [a, b] then it may lead to the adjacent, graph where all the 3 conditions of Rolles will be valid but the assertion will not, be true in (a, b)., LMVT THEOREM :, Let f(x) be a function of x subject to the following conditions :, f(x) is a continuous function of x in the closed interval of a ≤ x ≤ b., f ′ (x) exists for every point in the open interval a < x < b., f(a) ≠ f(b).
Page 21 :
f (b) − f (a ), b−a, , Geometrically, the slope of the secant line joining the curve at x = a & x = b is equal to the slope of the, tangent line drawn to the curve at x = c. Note the following :, , �, , Rolles theorem is a special case of LMVT since, , f (a) = f (b) ⇒ f ′ (c) =, , f ( b) − f (a ), = 0., b−a, , Note : Now [f (b) – f (a)] is the change in the function f as x changes from a to b so that [f (b) – f (a)] / (b – a) is, the average rate of change of the function over the interval [a, b]. Also f '(c) is the actual rate of change of, the function for x = c. Thus, the theorem states that the average rate of change of a function over an, interval is also the actual rate of change of the function at some point of the interval. In particular, for, instance, the average velocity of a particle over an interval of time is equal to the velocity at some instant, belonging to the interval. www.MathsBySuhag.com , www.TekoClasses.com, This interpretation of the theorem justifies the name "Mean Value" for the theorem., (c), APPLICATION OF ROLLES THEOREM FOR ISOLATING THE REAL ROOTS OF AN EQUATION f (x)=0, Suppose a & b are two real numbers such that ;, (i), f(x) & its first derivative f ′ (x) are continuous for a ≤ x ≤ b., (ii), f(a) & f(b) have opposite signs., (iii), f ′ (x) is different from zero for all values of x between a & b., Then there is one & only one real root of the equation f(x) = 0 between a & b., , function occur alternately & between two consecutive maximum values there is a minimum value & vice, versa., www.MathsBySuhag.com , www.TekoClasses.com, 2., A NECESSARY CONDITION FOR, MAXIMUM & MINIMUM :, If f(x) is a maximum or minimum at x = c & if f ′, (c) exists then f ′ (c) = 0., Note :, (i), The set of values of x for which f ′ (x) = 0 are often, called as stationary points or critical points. The, rate of change of function is zero at a stationary, point., (ii), In case f ′ (c) does not exist f(c) may be a maximum, or a minimum & in this case left hand and right, hand derivatives are of opposite signs., (iii), The greatest (global maxima) and the least (global, minima) values of a function f in an interval [a, b], are f(a) or f(b) or are given by the values of x for, which, f ′ (x) = 0., , .IN, FO, , Then there exists at least one point x = c such that a < c < b where f ′ (c) =, , (iv), , FUNCTIONS OF A SINGLE VARIABLE, HOW MAXIMA & MINIMA ARE CLASSIFIED, , 3., , x = b. Symbolically if, , f ( b ) < f ( b + h ), ⇒ x = b gives, f ( b ) < f ( b − h ), , minima for a sufficiently small positive h., Note that :, (i), the maximum & minimum values of a function, are also known as local/relative maxima or, local/relative minima as these are the greatest &, least values of the function relative to some, neighbourhood of the point in question., (ii), the term 'extremum' or (extremal) or 'turning, value' is used both for maximum or a minimum, value., (iii), a maximum (minimum) value of a function may, not be the greatest (least) value in a finite interval., (iv), a funct ion can have several maximum &, minimum values & a minimum value may even, be greater than a maximum value., (v), maximum & minimum values of a continuous, , N, AI, M, JE, E, , sufficiently small positive h., Similarly, a function f(x) is said to have a minimum, value at x = b if f(b) is least than every other value, assumed by f(x) in the immediate neighbourhood at, , SUFFICIENT CONDITION FOR EXTREME VALUES :, , f ′ (c- h) > 0 , ⇒ x = c is a point of local maxima, where f ′ (c) = 0., f ′ (c+ h) < 0, f ′ (c- h) < 0 , Similarly, ⇒ x = c is a point of local minima, where f ′(c) = 0., f ′ (c+ h) > 0, , A function f(x) is said to have a maximum at x, = a if f(a) is greater than every other value, assumed by f(x) in the immediate, neighbourhood of x = a. Symbolically, f (a ) > f (a + h), ⇒ x = a gives maxima for a, f (a ) > f (a − h), , dy, = 0, if it exists ,, dx, , or it fails to exist either by virtue of a vertical tangent, or by virtue of a geometrical sharp corner but not, because of discontinuity of function., , MAXIMA - MINIMA, 1., , Critical points are those where, , 4., (a), (b), 5., , Note : If f ′ (x) does not change sign i.e. has the same sign in a certain complete neighbourhood of c, then, f(x) is either strictly increasing or decreasing throughout this neighbourhood implying that f(c) is not an, extreme value of f., USE OF SECOND ORDER DERIVATIVE IN ASCERTAINING THE MAXIMA OR MINIMA:, f(c) is a minimum value of the function f, if f ′ (c) = 0 & f ′′ (c) > 0., f(c) is a maximum value of the function f, f ′ (c) = 0 & f ′′ (c) < 0., Note : if f ′′ (c) = 0 then the test fails. Revert back to the first order derivative check for ascertaning the, maxima or minima., SUMMARY−WORKING RULE :, FIRST :, When possible , draw a figure to illustrate the problem & label those parts that are important in the, problem. Constants & variables should be clearly distinguished., SECOND :, Write an equation for the quantity that is to be maximised or minimised. If this quantity is denoted by ‘y’,, it must be expressed in terms of a single independent variable x. his may require some algebraic, manipulations., THIRD :, If y = f (x) is a quantity t o be maximum or minimum, find those values of x fo r which, dy/dx = f ′(x) = 0., FOURTH :, Test each values of x for which f ′(x) = 0 to determine whether it provides a maximum or minimum or, neither. The usual tests are :, (a), If d²y/dx² is positive when dy/dx = 0 ⇒ y is minimum., If d²y/dx² is negative when dy/dx = 0 ⇒ y is maximum., If d²y/dx² = 0 when dy/dx = 0, the test fails.
Page 22 :
d 2y, changes sign., dx 2, , �, , Volume of a cone =, , �, , Curved surface of a cylinder = 2 π rh., , �, , Total surface of a cylinder = 2 π rh + 2 π r2., , �, , Volume of a sphere =, , 4, π r3 ., 3, , π r2 ., , �, , 7., , 1, π r2h., 3, , Surface area of a sphere = 4, 1, �, Area of a circular sector = r2 θ , when θ is in radians., 2, SIGNIFICANCE OF THE SIGN OF 2ND ORDER DERIVATIVE AND POINTS OF INFLECTION :, The sign of the 2nd order derivative determines the concavity of the, curve. Such points such as C & E on the graph where the concavity, of the curve changes are called the points of inflection. From the, graph we find that if:, , (i), , d 2y, > 0 ⇒ concave upwards, dx 2, , (ii), , Note that the graph exhibits two critical points one is a point of local, maximum & the other a point of inflection., , 14. Integration (Definite & Indefinite), 1., DEFINITION :, If f & g are functions of x such that g′(x) = f(x) then the function g is called a PRIMITIVE OR, ANTIDERIVATIVE OR INTEGRAL of f(x) w.r.t. x and is written symbolically as, , ∫, , f(x) dx = g(x) + c ⇔, , 2., , dy, < 0 ⇒ concave downwards., dx 2, 2, , dy, At the point of inflection we find that 2 = 0 &, dx, , d, {g(x) + c} = f(x), where c is called the constant of integration., dx, , (i), , STANDARD RESULTS :, , ∫, , (ax +, , ∫, , (iii), , ∫, , dx =, , eax+b dx =, , ∫, , (vii), , b)n, , (ax + b) n +1, a ( n + 1), , + c n ≠ −1 (ii), , ∫, , dx, 1, = ln (ax + b) + c, ax + b, a, , (iv), , ∫, , apx+q dx =, , 1, cos (ax + b) + c (vi), a, , ∫, , cos (ax + b) dx =, , 1, sin (ax + b) + c, a, , ∫, , cot(ax + b) dx =, , 1, ln sin(ax + b)+ c, a, , 1 ax+b, e, +c, a, , sin (ax + b) dx = −, , tan(ax + b) dx =, , 1, ln sec (ax + b) + c (viii), a, , 1, tan(ax + b) + c, a, , ∫, , 1 a px + q, (a > 0) + c, p �n a, , (ix), , ∫, , sec² (ax + b) dx =, , (xi), , ∫, , sec (ax + b) . tan (ax + b) dx =, , (xii), , ∫, , cosec (ax + b) . cot (ax + b) dx = − 1 cosec (ax + b) + c, a, , (xiii), , ∫, , secx dx = ln (secx + tanx) + c, , (xiv), , ∫, , cosec x dx = ln (cosecx − cotx) + c, , (xv), , ∫, , sinh x dx = cosh x + c, , (xviii), , 2, , for x ∈ (− ∞ , 1), for x ∈ (1 , ∞), , x 3/ 5, f (x) = [ 2 − x 2, , AI, , (Note that slant surfaces of a pyramid are triangles)., , defined as,www.MathsBySuhag.com , www.TekoClasses.com, , (v), , M, , �, , 1, Volume of a pyramid = area of the base x height., 3, 1, Curved surface of a pyramid = (perimeter of the base) x slant height., 2, , JE, E, , �, , d 2y, Inflection points can also occur if 2 fails to exist. For example, consider the graph of the function, dx, , N, , But if dy/dx changes sign from negative to zero to positive as x advances through x o t here is a, minimum. If dy/dx does not change sign, neither a maximum nor a minimum. Such points are called, INFLECTION POINTS., FIFTH :, If the function y = f (x) is defined for only a limited range of values a ≤ x ≤ b then examine x = a & x = b, for possible extreme values., SIXTH :, If the derivative fails to exist at some point, examine this point as possible maximum or minimum., Important Note :www.MathsBySuhag.com , www.TekoClasses.com, –, Given a fixed point A(x1, y1) and a moving point P(x, f (x)) on the curve y = f(x). Then AP will be, maximum or minimum if it is normal to the curve at P., –, If the sum of two positive numbers x and y is constant than their product is maximum if they are, equal, i.e. x + y = c , x > 0 , y > 0 , then, 1, xy = [ (x + y)2 – (x – y)2 ], 4, –, If the product of two positive numbers is constant then their sum is least if they are equal. i.e. (x +, y)2 = (x – y)2 + 4xy, 6., USEFUL FORMULAE OF MENSURATION TO REMEMBER :, �, Volume of a cuboid = lbh., �, Surface area of a cuboid = 2 (lb + bh + hl)., �, Volume of a prism = area of the base x height., �, Lateral surface of a prism = perimeter of the base x height., �, Total surface of a prism = lateral surface + 2 area of the base, (Note that lateral surfaces of a prism are all rectangles)., , .IN, FO, , (b), , positive for x < x 0 , dy, , If, is zero, for x = x 0 ⇒ a maximum occurs at x = x0., dx, negative for x > x 0 , , (xx), , ∫, , (xxii), , ∫, , (xvi), , cosech²x dx = − coth x + c, , (x), , cosec²(ax + b) dx = − 1 cot(ax + b)+ c, a, , 1, sec (ax + b) + c, a, , OR, , ∫, , OR ln tan, , dx, a +x, 2, , 2, , =, , 1, x, tan−1 + c, a, a, , 4, , (xix), , ∫, , (xxiii), , 2, , x, + c OR − ln (cosecx + cotx), 2, , cosh x dx = sinh x + c (xvii), , ∫, , sech²x dx = tanh x + c, , sech x . tanh x dx = − sech x + c, , cosech x . coth x dx = − cosech x + c, , ∫, , π, x, ln tan + + c, , (xxi), , ∫, , dx, x x −a, 2, , 2, , ∫, =, , dx, , a −x, 2, , 2, , = sin−1, , 1, x, sec−1 + c, a, a, , x, +c, a
Page 23 :
∫, , (xxv), , ∫, , dx, x +a, 2, , x 2 −a 2, , (vi), , ∫, , OR, , cosh−1, , x, +c, a, , (vii), , ∫, , ∫, , (xxxi), , ∫, , eax. sin bx dx =, , (xxxii), , ∫, , eax . cos bx dx =, , x, 2, , x 2 −a 2 dx =, , (iii), 4., (i), , ), , (viii), , ∫, , (ix), , ∫, , (, , n, , take xn common & put 1+x−n = tn, , n∈N ,, , ( n −1), n, , dx, , x 1+ x, n, , Take xn common & put 1 + x−n = t ., , ), , n 1/ n, , dx, a+bsin 2 x, , take xn common as x and put 1 + x −n = t ., , ∫, , OR, , dx, , OR, , a+bcos x, 2, , ∫, , dx, asin x + bsin x cosx +ccos 2 x, 2, , r, , Multiply N. . & D. . by sec² x & put tan x = t ., , x, a, sin−1 + c, 2, a, , ∫, , (x), , dx, a +bsin x, , dx, a+bcos x, , ∫, , OR, , dx, a + bsin x +ccosx, , ∫, , OR, , x 2 +a 2 +, , x, a2, sinh−1 + c, 2, a, , Hint Convert sines & cosines into their respective tangents of half the angles , put tan, , x 2 −a 2 −, , x, a2, cosh−1 + c, 2, a, , (xi) ∫, , e ax, (a sin bx − b cos bx) + c, a 2 +b 2, , N, AI, , du, , dx .∫ vdx dx where u & v are differentiable, , , function . Note : While using integration by parts, choose u & v such that, , v dx −, , ∫, , M, , ∫, , u.v dx = u, , ∫, , (xv), , JE, E, , ∫, , ∫, , (xiii), , (xiv), , du, , is simple to integrate., dx .∫ vdx dx, , , This is generally obtained, by keeping the order of u & v as per the order of the letters in ILATE, where, ; I − Inverse function,, L − Logarithmic function ,, A − Algebraic function, T − Trigonometric function & E − Exponential function, Partial fraction , spiliting a bigger fraction into smaller fraction by known methods ., , (b), , v dx is simple &, , ∫, , INTEGRALS OF THE TYPE :www.MathsBySuhag.com , www.TekoClasses.com, f ′( x ), OR ∫, dx put f(x) = t & proceed ., ∫ [ f(x)]n f ′(x) dx, [f ( x )]n, , x, =t, 2, , a.cosx + b.sin x +c, d, dx . Express Nr ≡ A(Dr) + B, (Dr) + c & proceed ., �.cosx + m.sin x + n, dx, , (xii), , e ax, (a cos bx + b sin bx) + c, a 2 +b 2, , Integration by part :, , ∫, , (, , x x +1, , TECHNIQUES OF INTEGRATION :, Substitution or change of independent variable ., , (a), , dx, 2, , Integral I = ∫ f(x) dx is changed to ∫ f(φ (t)) f ′ (t) dt , by a suitable substitution, x = φ (t) provided the later integral is easier to integrate ., , (ii), , dx, n∈N, x( x n +1), , r, , a 2 −x 2 +, , x, 2, , x 2 +a 2 dx =, , (xxx), , 3., (i), , x, +c, a, , 2, , x, 2, , a 2 −x 2 dx =, , ∫, , (xxix), , = ln x + x 2 −a 2 , , , , sinh−1, , x−a, dx, 1, ln, +c, =, 2, 2, x+a, 2a, x −a, , ∫, , (xxviii), , , , OR, , dx, a +x, 1, ln, +c, 2, 2 =, a −x, a −x, 2a, , ∫, , (xxvii), , , , 2, , dx, , ∫, , (xxvi), , = ln x + x 2 +a 2 , , .IN, FO, , (xxiv), , x 2 +1, dx OR, x 4 + K x 2 +1, , ∫, , x 2 −1, dx, x 4 + K x 2 +1, , Hint :, , Divide Nr & Dr by x² & proceed ., , ∫, , dx, , ( ax + b), , px + q, , &, , dx, ( ax + b ), , px 2 + qx + r, , ∫, , (, , dx, ax + bx + c, 2, , ,put ax +b =, , ), , 1, ;, t, , px + q, , ∫, , (ax, , ; put px + q = t2 ., dx, , 2, , + bx + c, , ), , px + qx + r, 2, , ∫, , x−α, dx or, β−x, , ∫ (x − α) (β − x) ;, , put x = α cos2 θ + β sin2 θ, , ∫, , x−α, dx or, x−β, , ∫ ( x − α ) ( x − β) ;, , put x = α sec2 θ − β tan2 θ, , ∫, , dx, , ( x − α ) ( x − β), , , put x =, , 1, t, , ; put x − α = t2 or x − β = t2 ., , DEFINITE, b, , ∫ f(x) dx = F(b) − F(a), , 1., , where K is any constant ., , where, , ∫, , INTEGRAL, , f(x) dx = F(x) + c, , a, b, , VERY IMPORTANT NOTE :, , If, , ∫ f(x) dx = 0 ⇒, , then the equation f(x) = 0 has atleast one root lying, , a, , (ii), , dx, , ∫ ax 2 + bx + c, Express, , (iii), , ∫, , ax2, , ,, , ∫, , dx, ax + bx + c, 2, , ,, , ∫, , + bx + c in the form of perfect square & then apply the standard results ., , px + q, dx ,, 2, ax + bx + c, , ∫, , px + q, ax 2 + bx + c, , in (a , b) provided f is a continuous function in (a , b) ., , ax 2 + bx + c dx, , 2., , ∫, , ex [f(x) + f ′(x)] dx = ex . f(x) + c, , (v), , ∫, , [f(x) + xf ′(x)] dx = x f(x) + c, , P−3, , b, , b, , a, , a, , ∫ f(x) dx = ∫ f(t) dt, , P−1, , dx ., , Express px + q = A (differential co-efficient of denominator) + B ., , (iv), , PROPERTIES OF DEFINITE INTEGRAL :www.MathsBySuhag.com , www.TekoClasses.com, provided f is same, , b, , c, , b, , a, , a, , c, , ∫ f(x) dx = ∫ f(x) dx + ∫ f(x) dx ,, , P−2, , b, , a, , a, , b, , ∫ f(x) dx = − ∫ f(x) dx, , where c may lie inside or outside the interval [a, b] . This property to be
Page 24 :
used when f is piecewise continuous in (a, b) ., Limit 1 n −1 f r =, ∑, n→∞, n r=1 n , , a, , P−4, , ∫ f(x) dx = 0, , if f(x) is an odd function i.e. f(x) = − f(−x) ., , −a, , 6., , 1, , ∫ f(x) dx, , ., , 0, , ESTIMATION OF DEFINITE INTEGRAL :, , a, , b, , = 2 ∫ f(x) dx, , if f(x) is an even function i.e. f(x) = f(−x) ., , (i), , 0, b, , ∫ f(x) dx = ∫ f(a + b − x) dx ,, a, , a, , ∫ f(x) dx, , =, , 0, , 0, , b + nT, , b, , 0, , if f(2a − x) = f(x), , ; where‘a’is the period of the function i.e. f(a + x) = f(x), , f(x) dx if f(x) is periodic with period 'a' ., , 0, , b, , b, , 1−, , 1 1 1 1, + − + +.....∞=ln2, 2 3 4 5, , (ii), , 1, 1, 1, 1, π2, ....., +, +, +, +, ∞, =, 6, 12 2 2 32 4 2, , (iii), , 1, 1, 1, π2, ....., −, +, −, +, ∞, =, 12, 12 2 2 32 4 2, , (iv), , 1, 1, 1, π2, ....., +, +, +, +, ∞, =, 8, 12 32 52 7 2, , a, , a, , on the interval [a, b] , then, , ∫ f(x) dx ≥ 0., a, , a, , WALLI’S FORMULA :www.MathsBySuhag.com , www.TekoClasses.com, ( m+n )( m+n−2)( m+n−4)....1or 2, , 0, , π, if both m and n are even (m, n ∈ N) ; = 1, 2, DERIVATIVE OF ANTIDERIVATIVE FUNCTION :, If h(x) & g(x) are differentiable functions of x then ,, , Where K =, , d, dx, , h( x ), , ∫, , M, , sinnx . cosmx dx = [( n−1)( n−3)( n−5)....1or 2][( m−1)( m−3)....1or 2] K, , 2., , JE, E, , π/2, , N, , a, , ∫ f(x)dx .P−12 If f(x) ≥ 0, , b, , AI, , ∫f ( x )dx ≤, , 1, , 1, 2, , +, 2, , 1, 4, , +, 2, , 1, 6, , otherwise, , f(t) dt = f [h (x)] . h′(x) − f [g (x)] . g′(x), , b, , A=, , ∫, , f (x) dx =, , a, , π2, 24, , ∫, , y dx., , a, , b, , ∫, , y dx in this case., , a, , 3., , Area between the curves y = f (x) & y = g (x) between the, ordinates at x = a & x = b is given by,, b, , A=, , ∫, , f (x) dx −, , ∫, , b, , g (x) dx =, , a, , a, , 4., , b, , ∫, , [ f (x) − g (x) ] dx., , a, , Average value of a function y = f (x) .r.t. x over an interval, , g( x ), , a ≤ x ≤ b is defined as :, , ∫ f(x) dx =, a, , 8, , +.....∞=, 2, , If the area is below the x−axis then A is negative. The convention, is to consider the magnitude only i.e., A=, , DEFINITE INTEGRAL AS LIMIT OF A SUM :, b, , 1, , b, , 5. The area function, 5., , +, 2, , A xa =, , n −1, , = Limit, h→0 h ∑ f (a + rh) where b − a = nh, r=0, , 6., If a = 0 & b = 1 then , Limit, n→∞ h ∑ f (rh) =, r=0, , 1, , ∫ f(x) dx, , A xa, , y (av) =, , 1, b−a, , b, , ∫, , f (x), , a, , d A xa, satisfies the differential equation, = f (x) with initial condition A aa = 0., dx, , Note : If F (x) is any integral of f (x) then ,, , Limit h [f (a) + f (a + h) + f (a + 2h) + ..... + f a + n − 1 h ], (, ), n→∞, , n −1, , 1, , THINGS TO REMEMBER :, 1., The area bounded by the curve y = f(x) , the x-axis and the, ordinates at x = a & x = b is given by,, , ∫ f(x) dx ≤ ∫ φ (x) dx, , b, , b, , ∫, , (i), , 15. AREA UNDER CURVE, (AUC), , a, , ∫, , < f(b).(b − a), , SOME IMPORTANT EXPANSIONS :www.MathsBySuhag.com , www.TekoClasses.com, , .IN, FO, , ∫, , ∫ f(x) dx, , 7., , (v), , a, , f(x) dx = (n − m), , For a monotonic increasing function in (a , b) ; f(a).(b − a) <, , a, , 0, , P−10 If f(x) ≤ φ(x) for a ≤ x ≤ b then, , 4., , (ii), , ∫ f(x) dx = ∫ f(x) dx where f(x) is periodic with period T & n ∈ I ., , ma, , 3., , 0, a, , 0, , ∫ f(x) dx = n ∫ f(x) dx, , na, , f(x) dx < f(a).(b − a), b, , ∫ f(x) dx = ∫ f(a − x)dx, , ∫ f(x) dx + ∫ f(2a − x) dx = 2 ∫ f(x) dx, , a + nT, , P−11, , a, , a, , na, , P−8, , a, , if f(2a − x) = − f(x), , = 0, , P−9, , a, , 0, , 0, , P−7, , In particular, , a, , 2a, , P−6, , ∫, a, , b, , P−5, , For a monotonic decreasing function in (a , b) ; f(b).(b − a) <, , ; where nh = 1 OR, , 0, , (a), , ∫, , f (x) dx = F (x) + c, , A aa = 0 = F (a) + c ⇒ c, , = − F (a), hence A xa = F (x) − F (a). Finally by taking x = b we get , A ab =, F (b) − F (a)., CURVE TRACING :, The following outline procedure is to be applied in Sketching the, graph of a function y = f (x) which in turn will be extremely useful to, quickly and correctly evaluate the area under the curves., Symmetry : The symmetry of the curve is judged as follows :
Page 25 :
Note that the general solution of a differential equation of the nth order contains ‘n’ & only ‘n’ independent, (i) If all the powers of y in the equation are even then the curve is symmetrical about the axis of x., arbitrary constants. The arbitrary constants in the solution of a differential equation are said to be, (ii) If all the powers of x are even , the curve is symmetrical about the axis of y., independent, when it is impossible to deduce from the solution an equivalent relation containing fewer, (iii) If powers of x & y both are even, the curve is symmetrical about the axis of x as well as y., arbitrary constants. Thus the two arbitrary constants A, B in the equation y = A ex + B are not independent, (iv) If the equation of the curve remains unchanged on interchanging x and y, then the curve is symmetrical, since the equation can be written as y = A eB. ex = C ex. Similarly the solution y = A sin x + B cos (x + C), about y = x., appears to contain three arbitrary constants, but they are really equivalent to two only., (v) If on interchanging the signs of x & y both the equation of the curve is unaltered then there is symmetry, 8., Elementary Types Of First Order & First Degree Differential Equations ., in opposite quadrants., TYPE−1. VARIABLES SEPARABLE : If the differential equation can be expressed as ;, (b), Find dy/dx & equate it to zero to find the points on the curve where you have horizontal tangents., f (x)dx + g(y)dy = 0 then this is said to be variable − separable type., (c), Find the points where the curve crosses the x−axis & also the y−axis., (d), Examine if possible the intervals when f (x) is increasing or decreasing. Examine what happens to ‘y’, A general solution of this is given by ∫ f(x) dx + ∫ g(y) dy = c, ;, when x → ∞ or − ∞., where c is the arbitrary constant . consider the example (dy/dx) = ex−y + x2. e−y., 7., USEFUL RESULTS :, (i), Whole area of the ellipse, x2/a2 + y2/b2 = 1 is π ab., Note : Sometimes transformation to the polar co−ordinates facilitates separation of variables., (ii), Area enclosed between the parabolas y2 = 4 ax & x2 = 4 by is 16ab/3., In this connection it is convenient to remember the following differentials. If x = r cos θ, (iii), Area included between the parabola y2 = 4 ax & the line y = mx is 8 a2/3 m3., ; y = r sin θ then,, (i) x dx + y dy = r dr, (ii) dx2 + dy2 = dr2 + r2 dθ2 (iii) x dy − y dx = r2 dθ, , 16. DIFFERENTIAL EQUATION, , A differential equation is said to be ordinary , if the differential coefficients have reference to a, single independent variable only and it is said to be PARTIAL if there are two or, more, independent variables . We are concerned with ordinary differential equations only. eg., , 7., , TYPE−3. HOMOGENEOUS EQUATIONS :www.MathsBySuhag.com , www.TekoClasses.com, , AI, , p, , 6., , dx, , M, , 4., 5., , example (x + y)2 d y = a2 ., , = 0 is a partial differential equation., Finding the unknown function is called SOLVING OR INTEGRATING the differential equation . The, solution of the differential equation is also called its PRIMITIVE, because the differential equation, can be regarded as a relation derived from it., The order of a differential equation is the order of the highest differential coefficient occuring in it., The degree of a differential equation which can be written as a polynomial in the derivatives is the, degree of the derivative of the highest order occuring in it , after it has been expressed in a form, free from radicals & fractions so far as derivatives are concerned, thus the differential equation :, q, , JE, E, , 3., , ∂u ∂u ∂u, +, +, ∂x ∂y ∂z, , .IN, FO, , 2., , N, , 1., , If x = r sec θ & y = r tan θ then x dx − y dy = r dr and x dy − y dx = r2 sec θ dθ ., DIFFERENTIAL EQUATIONS OF FIRST ORDER AND FIRST DEGREE, DEFINITIONS :, dy, = f (ax + by + c) , b ≠ 0., To solve this , substitute t = ax + by + c. Then the equation, An equation that involves independent and dependent variables and the derivatives of the dependent TYPE−2 :, dx, variables is called a DIFFERENTIAL EQUATION.www.MathsBySuhag.com , www.TekoClasses.com, reduces to separable type in the variable t and x which can be solved., Consider, t he, , d m −1 ( y ) , dmy , f(x , y) m + φ (x , y) , m −1 + ....... = 0 is order m & degree p. Note that in the differential, dx, , d x , equation ey′′′ − xy′′ + y = 0 order is three but degree doesn't apply., FORMATION OF A DIFFERENTIAL EQUATION :, If an equation in independent and dependent variables having some arbitrary constant is given , then, a differential equation is obtained as follows :, �, Differentiate the given equation w.r.t. the independent variable (say x) as many times, as the number of arbitrary constants in it ., �, Eliminate the arbitrary constants ., The eliminant is the required differential equation . Consider forming a differential, equation for y² = 4a(x + b) where a and b are arbitary constant ., Note : A differential equation represents a family of curves all satisfying some common properties. This, can be considered as the geometrical interpretation of the differential equation., GENERAL AND PARTICULAR SOLUTIONS :, The solution of a differential equation which contains a number of independent arbitrary constants equal, to the order of the differential equation is called the GENERAL SOLUTION (OR COMPLETE INTEGRAL OR, COMPLETE PRIMITIVE) . A solution obtainable from the general solution by giving particular values to the, constants is called a PARTICULAR SOLUTION., , A differential equation of the form, , f (x , y ), dy, =, where f (x , y) & φ (x , y) are homogeneous functions, φ (x , y), dx, , of x & y , and of the same degree , is called HOMOGENEOUS . This equation may also be reduced to, the form, , dy, , = g x & is solved by putting y = vx so that the dependent variable y is changed to, dx, y, , another variable v, where v is some unknown function, the differential equation is transformed to an, equation with variables separable. Consider, , y (x + y ), dy, +, = 0., x2, dx, , TYPE−4. EQUATIONS REDUCIBLE TO THE HOMOGENEOUS FORM :, a x + b1y + c1, If d y = 1, dx, , (i), (ii), , a 2 x + b 2 y + c2, , ;, , where a1 b2 − a2 b1 ≠ 0,, , a1, a, ≠ 2, b1, b2, , then the substitution x = u + h, y = v + k transform this equation to a homogeneous type in the new, variables u and v where h and k are arbitrary constants to be chosen so as to make the given, equation homogeneous which can be solved by the method as given in Type − 3. If, a1 b2 − a2 b1 = 0 , then a substitution u = a1 x + b1 y transforms the differential equation to an equation, with variables separable. and, b1 + a2 = 0 , then a simple cross multiplication and substituting d (xy) for x dy + y dx & integrating, term by term yields the result easily., x − 2y + 5, 2 x + 3y − 1, Consider d y =, ; dy =, , dx, , (iii), , i.e., , 2x + y − 1, , dx, , 4x + 6y − 5, , &, , dy, 2x − y + 1, =, dx, 6 x − 5y + 4, , In an equation of the form : y f (xy) dx + xg (xy)dy = 0 the variables can be separated by the substitution, xy = v., IMPORTANT NOTE :, (a), The function f (x , y) is said to be a homogeneous function of degree n if for any real number t, (≠ 0) , we have f (tx , ty) = tn f(x , y) .
Page 26 :
For e.g. f(x , y) = ax2/3 + hx1/3 . y1/3 + by2/3 is a homogeneous function of degree 2/3, , (b), , A differential equation of the form, , 0 The general integral of this equation, Φ1 (x, y, C) = 0 gives the family of orthogonal trajectories., Note : Following exact differentials must be remembered :, , dy, = f(x , y) is homogeneous if f(x , y) is a homogeneous, dx, , function of degree zero i.e. f(tx , ty) = t° f(x , y) = f(x , y). The function f does not depend on x &, , (i), , y, x, or ., x, y, LINEAR DIFERENTIAL EQUATIONS :www.MathsBySuhag.com , www.TekoClasses.com, A differential equation is said to be linear if the dependent variable & its differential coefficients occur, in the first degree only and are not multiplied together, The nth order linear differential equation, is of the form ;www.MathsBySuhag.com , www.TekoClasses.com, y separately but only on their ratio, , a0 (x), , dn y, d xn, , + a1(x), , d n −1 y, + ...... + an (x) . y = φ (x) . Where a0(x) , a1(x) ..... an(x) are called the, d x n −1, , coefficients of the differential equation. Note that a linear differential equation is always of the first, degree but every differental equation of the first degree need not be, , xdy + y dx = d(xy), , (ii), , x d y − y dx, y, = d , 2, x, x, xdy + ydx, = d (ln xy), xy, , (iii), , x, ydx − xdy, = d , 2, y, y, , (iv), , (v), , dx + dy, = d (ln (x + y)), x+y, , (vi), , x dy − yd x, y, = d ln , x, xy, xdy − ydx, y, , = d tan −1 , 2, 2, , x, x +y, , (vii), , x, ydx − xdy, = d ln , xy, y, , (viii), , (ix), , , ydx − xdy, x, = d tan −1 , 2, 2, y, , x +y, , (x), , (xi), , 1 x dy + y dx, d − =, xy, x2 y2, , (xii), , xdx + ydy, = d ln x 2 + y 2 , , , x2 + y2, , 3, , TYPE − 5. LINEAR DIFFERENTIAL EQUATIONS OF FIRST ORDER :, dy, The most general form of a linear differential equations of first order is, + Py = Q , where, dx, , .IN, FO, , d2 y d y , + + y2 = 0 is not linear, though its degree is 1., linear. e.g. the differential equation, d x2 d x , , (xiii), , 1., , N, , Pdx, NOTE : (1) The factor e ∫, on multiplying by which the left hand side of the differential equation, becomes the differential coefficient of some function of x & y , is called integrating factor of the, differential equation popularly abbreviated as I. F., , AI, , M, , It is very important to remember that on multiplying by the integrating factor , the left hand side becomes, the derivative of the product of y and the I. F., Some times a given differential equation becomes linear if we take y as the independent variable and, x as the dependent variable. e.g. the equation ;, (x + y + 1), , dy, = y2 + 3, dx, , can be written as (y2 + 3), , dx, = x + y + 1 which is a linear differential, dy, , equation., TYPE−6. EQUATIONS REDUCIBLE TO LINEAR FORM :, The equation, , dy, + py = Q . yn where P & Q functions of x , is reducible to the linear form by dividing, dx, , it by yn & then substituting y−n+1 = Z . Its solution can be obtained as in Type−5. Consider the, example (x3 y2 + xy) dx = dy., The equation, , 9., , 2., , JE, E, , (3), , e y x e y dy − e y dx, www.MathsBySuhag.com , www.TekoClasses.com, d =, x2, x, , 17. STRAIGHT LINES & PAIR OF STRAIGHT LINES, , Pdx, P& Q are functions of x . To solve such an equation multiply both sides by e ∫, ., , (2), , e x y e x dx − e x dy, d =, y2, y, , dy, + Py = Q . yn is called BERNOULI’S EQUATION., dx, , TRAJECTORIES :, Suppose we are given the family of plane curves. Φ (x, y, a) = 0, depending on a single parameter a., A curve making at each of its points a fixed angle α with the curve of the family passing through that, point is called an isogonal trajectory of that family ; if in particular α = π/2, then it is called an, orthogonal trajectory., Orthogonal trajectories : We set up the differential equation of the given family of curves. Let it be of the, , 1, form F (x, y, y') = 0 The differential equation of the orthogonal trajectories is of the form F x , y, − ′ =, y, , , 3., , DISTANCE FORMULA :, The distance between the points A(x1,y1) and B(x2,y2) is, , ( x1 − x 2 ) 2 + ( y1 − y 2 ) 2 ., , SECTION FORMULA :, If P(x , y) divides the line joining A(x1 , y1) & B(x2 , y2) in the ratio m : n, then ;, x=, , m x 2 + n x1, m+n, , ;, , y=, , my 2 +n y1, m+ n, , If, , m, m, is negative, the, is positive, the division is internal, but if, n, n, , division is external ., Note : If P divides AB internally in the ratio m : n & Q divides AB externally in the ratio m : n then, P & Q are said to be harmonic conjugate of each other w.r.t. AB., 2, 1, 1, Mathematically ;, i.e. AP, AB & AQ are in H.P.., = +, AB AP AQ, CENTROID AND INCENTRE :, If A(x1, y1), B(x2, y2), C(x3, y3) are the vertices of triangle ABC,, whose sides BC, CA, AB are of lengths a, b, c respectively, then the, x1+x 2 +x 3 y1+ y 2 + y 3 , & the, ,, coordinates of the centroid are : , 3, 3, , , coo rdinates, of, the, incentre, are, :, , ax1+bx 2 +cx 3 ay1+by 2 +cy 3 , , Note that incentre divides, ,, a, +, b, +, c, a, +, b, +, c, , , the angle bisectors in the ratio, (b + c) : a ; (c + a) : b, & (a + b) : c., REMEMBER :(i) Orthocentre , Centroid & circumcentre are, always collinear & centroid divides the line joining, orthocentre & cercumcentre in the ratio 2 : 1 ., (ii), In an isosceles triangle G, O, I & C lie on the same line .
Page 27 :
4., , SLOPE FORMULA :, If θ is the angle at which a straight line is inclined to the positive direction of x−axis, &, 0° ≤ θ < 180°, θ ≠ 90°, then the slope of the line, denoted by m, is defined by m = tan θ. If θ is 90°, m does, not exist, but the line is parallel to the y−axis.If θ = 0, then m = 0 & the line is parallel to the x−axis. If, A (x1, y1) & B (x2, y2), x1≠ x2, are points on a straight line, then the slope m of the line is given by: m =, , between them, then tan θ =, , Note : Let m1, m2, m3 are the slopes of three lines L1 = 0 ; L2 = 0 ; L3 = 0 where m1 > m2 > m3, then the interior angles of the ∆ ABC found by these lines are given by,, , y1−y 2 , , , x −x ., 1 2, , tan A =, , 11., CONDITION OF COLLINEARITY OF THREE POINTS − (SLOPE FORM) :Points A (i), y1−y 2 y 2 −y 3 , = , x −x ., x1−x 2 2 3 , , (x1, y1), B (x2, y2), C(x3, y3) are collinear if , , 6., (i), (ii), (iii), , (ii), , EQUATION OF A STRAIGHT LINE IN VARIOUS FORMS :, Slope − intercept form: y = mx + c is the equation of a straight line whose slope is m & which, makes an intercept c on the y−axis ., Slope one point form: y − y1 = m (x − x1) is the equation of a straight line whose slope is m & (iii), which passes through the point (x1, y1)., Parametric form : The equation of the line in parametric form is given by, x − x1 y − y1, =, cos θ, sin θ, , = r (say). Where ‘r’ is the distance of any point (x , y) on the line from the fixed, , point (x1, y1) on the line. r is positive if the point (x, y) is on the right of (x1, y1) and negative if (x,, y) lies on the left of (x1, y1) .www.MathsBySuhag.com , www.TekoClasses.com, , (vii), 7., , 8., , N, , a, , b, , & OY respectively ., 13., Perpendicular form : xcos α + ysin α = p is the equation of the straight line where the length, of the perpendicular from the origin O on the line is p and this perpendicular makes angle α with, positive side of x−axis ., 14., General Form : ax + by + c = 0 is the equation of a straight line in the general form, POSITION OF THE POINT (x1, y1) RELATIVE TO THE LINE ax + by + c = 0 : If ax1, + by1 + c is of the same sign as c, then the point (x1, y1) lie on the origin side of ax + by + c = 0, . But if the sign of ax1 + by1 + c is opposite to that of c, the point (x1, y1) will lie on the non-origin, side of ax + by + c = 0., THE RATIO IN WHICH A GIVEN LINE DIVIDES THE LINE SEGMENT JOINING, 15., TWO POINTS :, Let the given line ax + by + c = 0 divide the line segment joining A(x1, y1) & B(x2, y2) in the ratio, m, m, a x + b y1 + c, is negative, m : n, then = − 1, . If A & B are on the same side of the given line then, n, n, a x2 + b y2 + c, , but if A & B are on opposite sides of the given line , then, , 9., , m, n, , The area of the parallelogram =, , p1 p 2, sin θ, , , where p1 & p2 are distances between two pairs of opposite, , sides & θ is the angle between any two adjacent sides . Note that area of the parallelogram, bounded by the lines y = m1x + c1, y = m1x + c2 and y = m2x + d1 , y = m2x + d2 is given by, , 16., , a x1 + b y1 + c, a +b, , CONDITION OF CONCURRENCY :, Three lines a1x + b1y + c1 = 0, a2x + b2y + c2 = 0 & a3x + b3y + c3 = 0 are concurrent if, a1, a2, a3, , b1, b2, b3, , c1, c 2 = 0 . Alternatively : If three constants A, B & C can be found such that A(a1x + b1y, c3, , + c1) + B(a2x + b2y + c2) + C(a3x + b3y + c3) ≡ 0 , then the three straight lines are concurrent., AREA OF A TRIANGLE :, If (xi, yi), i = 1, 2, 3 are the vertices of a triangle, then its area, x, , y, , 1, , 1, 1, is equal to 1 x 2 y 2 1 , provided the vertices are considered in the counter clockwise sense. The, 3, , y3 1, , above formula will give a (−) ve area if the vertices (xi, yi) , i = 1, 2, 3 are placed in the clockwise, sense., , LENGTH OF PERPENDICULAR FROM A POINT ON A LINE :, , 2, , Equations of straight lines through (x1 , y1) making angle α with y = mx + c are:, (y − y1) = tan (θ − α) (x − x1) & (y − y1) = tan (θ + α) (x − x1) , where tan θ = m., , 2x, , is positive, , The length of perpendicular from P(x1, y1) on ax + by + c = 0 is, 10., , Note that the coefficients of x & y in both the equations must be same., , a 2 +b 2, , PERPENDICULAR LINES :, When two lines of slopes m1& m2 are at right angles, the product of their slopes is −1, i.e. m1 m2, y −y, Two point form : y − y1 = 2 1 (x − x1) is the equation of a straight line which passes, = −1. Thus any line perpendicular to ax + by + c = 0 is of the form bx − ay + k = 0, where k is, x 2 − x1, any parameter.www.MathsBySuhag.com , www.TekoClasses.com, through the points (x1, y1) & (x2, y2) ., (ii)St. lines ax + by + c = 0 & a′ x + b′ y + c′ = 0 are right angles if & only if aa′ + bb′ = 0., x y, Intercept form : + = 1 is the equation of a straight line which makes intercepts a & b on OX, , AI, , (vi), , c1 −c 2, , 0 is, , 12., (i), , M, , (v), , PARALLEL LINES :, When two straight lines are parallel their slopes are equal. Thus any line parallel to ax + by + c =, 0 is of the type ax + by + k = 0 . Where k is a parameter., The distance between two parallel lines with equations ax + by + c1 = 0 & ax + by + c2 =, , (c1 − c2 ) (d1 − d 2 ), ., m1 − m 2, , JE, E, , (iv), , m − m3, m1 − m2, & tan C = m 3 − m1, ; tan B = 2, 1 + m2 m3, 1 + m1 m2, 1 + m 3 m1, , .IN, FO, , 5., , m1 − m2, ., 1+ m1 m2, , 2, , x1, The points (xi , yi) , i = 1 , 2 , 3 are collinear if x 2, x3, , ., , ANGLE BETWEEN TWO STRAIGHT LINES IN TERMS OF THEIR SLOPES :, If m1 & m2 are the slopes of two intersecting straight lines (m1 m2 ≠ −1) & θ is the acute angle, , CONDITION OF COLLINEARITY OF THREE POINTS−, −(AREA FORM):, , 17., , y1 1, y 2 1 =0., y3 1, , THE EQUATION OF A FAMILY OF STRAIGHT LINES PASSING THROUGH THE, POINTS OF INTERSECTION OF TWO GIVEN LINES:, The equation of a family of lines passing through the point of intersection of, a1x + b1y + c1 = 0 & a2x + b2y + c2 = 0 is given by (a1x + b1y + c1) + k(a2x + b2y + c2) = 0, where k is an
Page 28 :
a′x + b′y + c′ = 0 (ab′ ≠ a′b) are :, , a ′ 2 + b′ 2, , To discriminate between the acute angle bisector & the obtuse angle bisector, If θ be the angle between one of the lines & one of the bisectors, find tan θ ., If tan θ < 1, then 2 θ < 90° so that this bisector is the acute angle bisector ., If tan θ > 1, then we get the bisector to be the obtuse angle bisector ., To discriminate between the bisector of the angle containing the origin & that of the, angle, not, containing the origin. Rewrite the equations , ax + by + c = 0 &, a′x + b′y + c′ = 0 such that, a +b, 2, , a x + by + c, , of the bisector of the angle containing the origin &, , a 2 + b2, , =+, , =−, , a ′ x + b ′ y + c′, , a ′ + b′, 2, , gives the equation, , 2, , a ′ x + b ′ y + c′, , a ′2 + b′2, , gives the equation of, , the bisector of the angle not containing the origin.www.MathsBySuhag.com , www.TekoClasses.com, To discriminate between acute angle bisector & obtuse angle bisector proceed as follows, Write ax + by + c = 0 & a′x + b′y + c′ = 0 such that constant terms are positive ., If aa′ + bb′ < 0 , then the angle between the lines that contains the origin is acute and the equation of the, bisector of this acute angle is, a x + by + c, , therefore, , a 2 + b2, , =−, , a x +by+c, , a +b, 2, , 2, , a ′ x + b ′ y + c′, , a ′ 2 + b′ 2, , =+, , a ′ x + b ′ y + c′, , a ′ + b′, 2, , 2, , a 2 + b2, , =−, , (ii), , 21., , 22., , a ′2 + b′2, , is the equation of other bisector., Another way of identifying an acute and obtuse angle bisector is as follows :, Let L1 = 0 & L2 = 0 are the given lines & u1 = 0 and, u2 = 0 are the, bisectors between L1 = 0 & L2 = 0. Take a point P on any one of the lines L1, = 0 or L2 = 0 and drop perpendicular on u1 = 0 & u2 = 0 as shown. If ,, p < q ⇒ u1 is the acute angle bisector ., , 23., −−, , −−, , L1 = 0, P p, q, , −−, , −, , bg2, , −, , ch2, , −−, , = 0, i.e. if, , a h g, h b f = 0., g f c, , The angle θ between the two lines representing by a general equation is the same as that between the two, lines represented by its homogeneous part only ., The joint equation of a pair of straight lines joining origin to the points of intersection of the line given, by lx + my + n = 0 ................ (i), &, the 2nd degree curve : ax² + 2hxy + by² + 2gx + 2fy + c = 0, ....... (ii), 2, , ax2, , + 2hxy +, , by2, , l x +my , l x + m y l x + my , + 2fy, +c, = 0 ...... (iii), + 2gx , −n , −n −n , , The equation to the straight lines bisecting the angle between the straight lines,, ax2 + 2hxy + by2 = 0 is, , a ′ x + b ′ y + c′, , xy, x2 − y2, .www.MathsBySuhag.com , www.TekoClasses.com, =, h, a−b, , The product of the perpendiculars, dropped from (x1, y1) to the pair of lines represented by the equation,, a x1 + 2 h x1y1 + b y1, 2, , −−, , a x + by + c, , p > q ⇒ u1 is the obtuse angle bisector ., , L2 = 0, , −−, , −−, , −−, , ax² + 2hxy + by² = 0 is, , 24., , u2 = 0, , Note : Equation of straight lines passing through P(x1, y1) & equally inclined with the lines a1x + b1y +, c1 = 0 & a2x + b2y + c2 = 0 are those which are parallel to the bisectors between these two lines & passing, through the point P ., , A PAIR OF STRAIGHT LINES THROUGH ORIGIN :, A homogeneous equation of degree two of the type ax² + 2hxy + by² = 0 always represents a pair of, , (a − b )2 + 4 h 2, , 2, , ., , Any second degree curve through the four point of intersection of f(x y) = 0 & xy = 0 is given by f (x y), + λ xy = 0 where f(xy) = 0 is also a second degree curve., , 18. CIRCLE, , u1 = 0, , p = q ⇒ the lines L1 & L2 are perpendicular ., , 19., (i), , abc + 2fgh −, , af2, , l x + my , = 1., −n , , −−, , ; therefore, , GENERAL EQUATION OF SECOND DEGREE REPRESENTING A PAIR OF STRAIGHT LINES:, ax2 + 2hxy + by2 + 2gx + 2fy + c = 0 represents a pair of straight lines if:, , −−, , a ′2 + b′2, , 20., (i), , (iii) is obtained by homogenizing (ii) with the help of (i), by writing (i) in the form: , , −−, , a ′ x + b ′ y + c′, , −−, , =+, , −−, , (v), , 2, , (a), At right angles to each other is a + b = 0. i.e. co−efficient of x2 + coefficient of y2 =0., (b) Coincident is h2 = ab., (c), Equally inclined to the axis of x is h = 0. i.e. coeff. of xy = 0., Note: A homogeneous equation of degree n represents n straight lines passing through origin., , −−, , a +b, 2, , 2 h2 − a b, tan θ =, . The condition that these lines are:, a+b, , is the equation of other bisector.., , If, however , aa′ + bb′ > 0 , then the angle between the lines that contains the origin is obtuse & the, equation of the bisector of this obtuse angle is:, a x + by + c, , a, 2h, & m1 m2 = ., b, b, , If θ is the acute angle between the pair of straight lines represented by, ax2 + 2hxy + by2 = 0, then;, , is, , JE, E, , (iv), , 2, , (iii), , lines are coincident ., lines are imaginary with real point of intersection i.e. (0, 0), , If y = m1x & y = m2x be the two equations represented by ax² + 2hxy + by2 = 0, then;, m1 + m2 = −, , N, , a x + by + c, , the constant terms c , c′ are positive. Then;, , (ii), , AI, , (iii), , a 2 + b2, , a ′ x + b ′ y + c′, , =±, , h² = ab ⇒, h² < ab ⇒, , (b), (c), , M, , (ii), , a x + by + c, , straight lines passing through the origin & if :, (a), h² > ab ⇒, lines are real & distinct ., , .IN, FO, , arbitrary real number., Note: If u1 = ax + by + c , u2 = a′x + b′y + d , u3 = ax + by + c′ , u4 = a′x + b′y + d′, then, u1 = 0; u2 = 0; u3 = 0; u4 = 0 form a parallelogram., u2 u3 − u1 u4 = 0 represents the diagonal BD., Proof : Since it is the first degree equation in x & y it is a straight line. Secondly point B satisfies the equation, because the co−ordinates of B satisfy u2 = 0 and u1 = 0., Similarly for the point D. Hence the result., On the similar lines u1u2 − u3u4 = 0 represents the diagonal AC., Note: The diagonal AC is also given by u1 + λu4 = 0 and u2 + µu3 = 0, if the two equations are identical for, some λ and µ., [For getting the values of λ & µ compare the coefficients of x, y & the constant terms], 18., BISECTORS OF THE ANGLES BETWEEN TWO LINES :, (i), Equations of the bisectors of angles between the lines ax + by + c = 0 &, , STANDARD RESULTS :, 1., , EQUATION OF A CIRCLE IN VARIOUS FORM :, (a) The circle with centre(h, k) & radius‘r’has the equation ;(x − h)2 + (y − k)2 = r2., (b), The general equation of a circle is x2 + y2 + 2gx + 2fy + c = 0 with centre as :, (−g, −f) & radius =, , g2 + f 2 − c .
Page 29 :
Remember that every second degree equation in x & y in which coefficient of x2 = coefficient of, y2 & there is no xy term always represents a circle., If, g2 + f 2 − c > 0 ⇒, real circle., 2, 2, point circle., g + f − c = 0⇒, g2 + f 2 − c < 0 ⇒, imaginary circle., Note that the general equation of a circle contains three arbitrary constants, g, f & c which corresponds to the fact, that a unique circle passes through three non collinear points., (c), The equation of circle with (x1 , y1) & (x2 , y2) as its diameter is :, (x − x1) (x − x2) + (y − y1) (y − y2) = 0., Note that this will be the circle of least radius passing through (x1 , y1) & (x2 , y2)., 2., INTERCEPTS MADE BY A CIRCLE ON THE AXES :, The intercepts made by the circle x2 + y2 + 2gx + 2fy + c = 0 on the co-ordinate axes are 2 g2 − c, , 7., (a), , A FAMILY OF CIRCLES :, The equation of the family of circles passing through the points of intersection of two circles S1 = 0, & S2 = 0 is :, S1 + K S2 = 0, (K ≠ −1)., , (b), , The equation of the family of circles passing through the point of intersection of a circle S = 0 &, a line L = 0 is given by S + KL = 0.www.MathsBySuhag.com , www.TekoClasses.com, , (c), , The equation of a family of circles passing through two given points (x1 , y1) & (x2 , y2) can be written, x, in the form : (x − x1) (x − x2) + (y − y1) (y − y2) + K x1, x2, , (d), , & 2 f 2 − c respectively.., , (f), , 8., , AI, , M, , 6., (a), , TANGENT & NORMAL :, The equation of the tangent to the circle x2 + y2 = a2 at its point (x1 , y1) is,, x x1 + y y1 = a2. Hence equation of a tangent at (a cos α, a sin α) is ;, x cos α + y sin α = a. The point of intersection of the tangents at the points P(α) and Q(β) is, α+β, 2, α−β, cos 2, , acos, , (b), (c), , α −β, α +β, α +β, + y sin, = a cos, ., 2, 2, 2, , JE, E, , circle x2 + y2 = a2 is x cos, , ,, , α+β, 2, α −β, cos 2, , a sin, , ., , The equation of the tangent to the circle x2 + y2 + 2gx + 2fy + c = 0 at its point (x1 , y1) is xx 1 +, yy1 + g (x + x1) + f (y + y1) + c = 0., y = mx + c is always a tangent to the circle x2 + y2 = a2 if c2 = a2 (1 + m2) and the point of contact is, a 2m a 2 , , ., −, c, c, , , (d), , If a line is normal / orthogonal to a circle then it must pass through the centre of the circle. Using, this fact normal to the circle x2 + y2 + 2gx + 2fy + c = 0 at (x1 , y1) is, y − y1 =, , y1 + f, (x − x1)., x1 + g, , y2, , 1, 1 = 0 where K is a parameter.., 1, , The equation of a family of circles touching a fixed line y − y1 = m (x − x1) at the fixed point (x1 , y1) is (x −, x1)2 + (y − y1)2 + K [y − y1 − m (x − x1)] = 0 , where K is a parameter., In case the line through (x1 , y1) is parallel to y - axis the equation of the family of circles touching it, at (x1 , y1) becomes (x − x1)2 + (y − y1)2 + K (x − x1) = 0., Also if line is parallel to x - axis the equation of the family of circles touching it at, (x1 , y1) becomes (x − x1)2 + (y − y1)2 + K (y − y1) = 0., Equation of circle circumscribing a triangle whose sides are given by L1 = 0 ; L2 = 0 & L3 = 0 is given, by ; L1L2 + λ L2L3 + µ L3L1 = 0 provided co-efficient of xy = 0 & co-efficient of x2 = co-efficient of y2., Equation of circle circumscribing a quadrilateral whose side in order are represented by the lines, L1 = 0, L2 = 0, L3 = 0 & L4 = 0 is L1L3 + λ L2L4 = 0 provided co-efficient of x2 = co-efficient of y2 and, co-efficient of xy = 0., LENGTH OF A TANGENT AND POWER OF A POINT :, The length of a tangent from an external point (x1 , y1) to the circle S ≡ x2 + y2 + 2gx + 2fy + c =, , .IN, FO, , (e), , N, , NOTE :, If, g2 − c > 0, ⇒, circle cuts the x axis at two distinct points., 2, If, g =c, ⇒, circle touches the x-axis., 2, If, g <c, ⇒, circle lies completely above or below the x-axis., 3., POSITION OF A POINT w.r.t. A CIRCLE :, The point (x1 , y1) is inside, on or outside the circle x2 + y2 + 2gx + 2fy + c = 0., according as x12 + y12 + 2gx1 + 2fy1 + c ⇔ 0 ., Note : The greatest & the least distance of a point A from a circle, with centre C & radius r is AC + r & AC − r respectively., 4., LINE & A CIRCLE :, Let L = 0 be a line & S = 0 be a circle. If r is the radius of the circle & p is the length of the, perpendicular from the centre on the line, then :www.MathsBySuhag.com , www.TekoClasses.com, (i), p > r ⇔ the line does not meet the circle i. e. passes out side the circle., (ii), p = r ⇔ the line touches the circle., (iii), p < r ⇔ the line is a secant of the circle., (iv), p = 0 ⇒ the line is a diameter of the circle., 5., PARAMETRIC EQUATIONS OF A CIRCLE :, The parametric equations of (x − h)2 + (y − k)2 = r2 are :, x = h + r cos θ ; y = k + r sin θ ; − π < θ ≤ π where (h, k) is the centre,, r is the radius & θ is a parameter. Note that equation of a straight line joining two point α & β on the, , y, y1, , 9., , 10., , 0 is given by L = x12 + y12 + 2 gx1 + 2 f1 y + c = S1 . Square of length of the tangent from the point, P is also called THE POWER OF POINT w.r.t. a circle. Power of a point remains constant w.r.t. a circle., Note that : power of a point P is positive, negative or zero according as the point ‘P’ is outside, inside, or on the circle respectively., DIRECTOR CIRCLE :, The locus of the point of intersection of two perpendicular tangents is called the DIRECTOR CIRCLE of the, , given circle. The director circle of a circle is the concentric circle having radius equal to 2 times the, original circle., EQUATION OF THE CHORD WITH A GIVEN MIDDLE POINT :, The equation of the chord of the circle S ≡ x2 + y2 + 2gx + 2fy + c = 0 in terms of its mid point M (x1,, y1) is y − y1 = −, , x1 + g, (x − x1). This on simplication can be put in the form xx1 + yy1 + g (x + x1) +, y1 + f, , f (y + y1) + c = x12 + y12 + 2gx1 + 2fy1 + c which is designated by T = S1. Note that :, the shortest, chord of a circle passing through a point ‘M’ inside the circle, is one chord whose middle point is, M., 11., CHORD OF CONTACT :, If two tangents PT1 & PT2 are drawn from the point P (x1, y1) to the circle, S ≡ x2 + y2 + 2gx + 2fy + c = 0, then the equation of the chord of contact T1T2 is : xx1 + yy1 + g (x +, x1) + f (y + y1) + c = 0., REMEMBER :, (a), Chord of contact exists only if the point ‘P’ is not inside ., , 2LR, (b), , Length of chord of contact T1 T2 =, , (c), , R L3, Area of the triangle formed by the pair of the tangents & its chord of contact = 2 2 Where R is, R +L, , R 2 + L2, , ., , the radius of the circle & L is the length of the tangent from (x1, y1) on S = 0.
Page 30 :
(e), (f), , Angle between the pair of tangents from (x1, y1) =, , tangent., Equation of the circle circumscribing the triangle PT1 T2 is :, (x − x1) (x + g) + (y − y1) (y + f) = 0., The joint equation of a pair of tangents drawn from the point A (x1 , y1) to the circle, x2 + y2 + 2gx + 2fy + c = 0 is : SS1 = T2. Where S ≡ x2 + y2 + 2gx + 2fy + c ; S1 ≡ x12 + y12 + 2gx1, + 2fy1 + c T ≡ xx1 + yy1 + g(x + x1) + f(y + y1) + c., , 12., (i), , POLE & POLAR :, If through a point P in the plane of the circle , there be drawn any straight line to meet the circle in, Q and R, the locus of the point of intersection of the tangents, at Q & R is called the POLAR OF THE POINT P ; also P is called the POLE OF THE POLAR., (ii), The equation to the polar of a point P (x1 , y1 ) w.r.t. the circle x2 + y2 = a 2 is given by, xx1 + yy1 = a2, & if the circle is general then the equation of the polar becomes, xx1 + yy1 + g (x + x1) + f (y + y1) + c = 0. Note that if the point (x1 , y1) be on the circle then the chord of, contact, tangent & polar will be represented by the same equation., , (iv), , 19.CONIC SECTION PARABOLA, 1., , CONIC SECTIONS:, A conic section, or conic is the locus of a point which moves in a plane so that its distance from a fixed, point is in a constant ratio to its perpendicular distance from a fixed straight line., �, The fixed point is called the FOCUS., �, The fixed straight line is called the DIRECTRIX., �, The constant ratio is called the ECCENTRICITY denoted by e., �, The line passing through the focus & perpendicular to the directrix is called the AXIS., �, A point of intersection of a conic with its axis is called a VERTEX., 2., GENERAL EQUATION OF A CONIC : FOCAL DIRECTRIX PROPERTY :, The general equation of a conic with focus (p, q) & directrix lx + my + n = 0 is :, (l2 + m2) [(x − p)2 + (y − q)2] = e2 (lx + my + n)2 ≡ ax2 + 2hxy + by2 + 2gx + 2fy + c = 0, 3., , DISTINGUISHING BETWEEN THE CONIC :, The nature of the conic section depends upon the position of the focus S w.r.t. the directrix & also upon the, value of the eccentricity e. Two different cases arise., CASE (I) : WHEN THE FOCUS LIES ON THE DIRECTRIX., In this case D ≡ abc + 2fgh − af2 − bg2 − ch2 = 0 & the general equation of a conic represents a pair of, straight lines if :www.MathsBySuhag.com , www.TekoClasses.com, e > 1 the lines will be real & distinct intersecting at S., e = 1 the lines will coincident., e < 1 the lines will be imaginary., CASE (II) : WHEN THE FOCUS DOES NOT LIE ON DIRECTRIX., a parabola, an ellipse, a hyperbola rectangular hyperbola, e = 1 ; D ≠ 0, 0 < e < 1 ; D ≠ 0 ;, e>1;D≠0;, e>1;D≠0, h² = ab, h² < ab, h² > ab, h² > ab ; a + b = 0, 4., PARABOLA : DEFINITION :, A parabola is the locus of a point which moves in a plane, such that its distance from a fixed point (focus), is equal to its perpendicular distance from a fixed straight line (directrix)., Standard equation of a parabola is y2 = 4ax. For this parabola :, (i) Vertex is (0, 0), (ii) focus is (a, 0), (iii) Axis is y = 0 (iv) Directrix is x + a = 0, FOCAL DISTANCE :The distance of a point on the parabola from the focus is called the FOCAL DISTANCE, OF THE POINT., FOCAL CHORD :, A chord of the parabola, which passes through the focus is called a FOCAL CHORD., DOUBLE ORDINATE :, A chord of the parabola perpendicular to the axis of the symmetry is called, a DOUBLE ORDINATE., LATUS RECTUM :, A double ordinate passing through the focus or a focal chord perpendicular to the axis of parabola is called, the LATUS RECTUM. For y2 = 4ax., �Length of the latus rectum = 4a. �ends of the latus rectum are L(a, 2a) & L' (a, − 2a)., Note that:, (i), Perpendicular distance from focus on directrix = half the latus rectum., (ii)Vertex is middle point of the focus & the point of intersection of directrix & axis., (iii), Two parabolas are laid to be equal if they have the same latus rectum., Four standard forms of the parabola are y2 = 4ax ; y2 = − 4ax ; x2 = 4ay ; x2 = − 4ay, 5., POSITION OF A POINT RELATIVE TO A PARABOLA :, The point (x1 y1 ) lies outside, on or inside the parabola y2 = 4ax according as the expression, y12 − 4ax1 is positive, zero or negative., , N, , (ii), (iii), , Lext = d 2 − (r1 − r2 ) 2 & Lint =, , d 2 − (r1 + r2 ) 2 ., , Where d = distance between the centres of the two circles . r1 & r2 are the radii of the 2 circles., (v), The direct common tangents meet at a point which divides the line joining centre of circles, externally in the ratio of their radii., Transverse common tangents meet at a point which divides the line joining centre of circles, internally in the ratio of their radii., 14., RADICAL AXIS & RADICAL CENTRE :, The radical axis of two circles is the locus of points whose powers w.r.t. the two circles are equal. The, equation of radical axis of the two circles S1 = 0 & S2 = 0 is given ;, S1 − S2 = 0 i.e. 2 (g1 − g2) x + 2 (f1 − f2) y + (c1 − c2) = 0., NOTE THAT :, (a), If two circles intersect, then the radical axis is the common chord of the two circles., (b), If two circles touch each other then the radical axis is the common tangent of the two circles at the, common point of contact., (c), Radical axis is always perpendicular to the line joining the centres of the 2circles., (d), Radical axis need not always pass through the mid point of the line joining the centres of the two, circles., (e), Radical axis bisects a common tangent between the two circles., (f), The common point of intersection of the radical axes of three circles taken two at a time is called, the radical centre of three circles., (g), A system of circles , every two which have the same radical axis, is called a coaxal system., , Pairs of circles which do not have radical axis are concentric., ORTHOGONALITY OF TWO CIRCLES :, Two circles S1= 0 & S2= 0 are said to be orthogonal or said to intersect orthogonally if the tangents, at their point of intersection include a right angle. The condition for two circles to be orthogonal, is : 2 g1 g2 + 2 f1 f2 = c1 + c2 ., , Note :, (a), Locus of the centre of a variable circle orthogonal to two fixed circles is the radical axis between the two, fixed circles ., (b), If two circles are orthogonal, then the polar of a point 'P' on first circle w.r.t. the second circle passes, through the point Q which is the other end of the diameter through P . Hence locus of a point which moves, such that its polars w.r.t. the circles S1 = 0 , S2 = 0 & S3 = 0 are concurrent in a circle which is orthogonal, to all the three circles., , AI, , 13., (i), , M, , (iv), (v), , Aa 2 Ba 2 , ., ,−, Pole of a given line Ax + By + C = 0 w.r.t. any circle x2 + y2 = a2 is −, C , C, If the polar of a point P pass through a point Q, then the polar of Q passes through P., Two lines L1 & L2 are conjugate of each other if Pole of L1 lies on L2 & vice versa Similarly two points, P & Q are said to be conjugate of each other if the polar of P passes through Q & vice-versa., COMMON TANGENTS TO TWO CIRCLES :, Where the two circles neither intersect nor touch each other , there are FOUR common tangents, two, of them are transverse & the others are direct common tangents., When they intersect there are two common tangents, both of them being direct., When they touch each other :www.MathsBySuhag.com , www.TekoClasses.com, (a), EXTERNALLY : there are three common tangents, two direct and one is the tangent at the p o in t, of contact ., (b), INTERNALLY : only one common tangent possible at their point of contact., Length of an external common tangent & internal common tangent to the two circles is given by:, , JE, E, , (iii), , (h), 15., , .IN, FO, , (d), , 2R L , , L2 −R 2 where R = radius ; L = length of, , , , tan−1
Page 31 :
LINE & A PARABOLA :, The line y = mx + c meets the parabola y2 = 4ax in two points real, coincident or imaginary according as, a, a > c m ⇒ condition of tangency is, c = ., <, m, 4 , 2, 7., Length of the chord intercepted by the parabola on the line y = m x + c is : 2 a (1 + m )(a − mc) ., m , Note: length of the focal chord making an angle α with the x− axis is 4aCosec² α., 8., PARAMETRIC REPRESENTATION :, The simplest & the best form of representing the co−ordinates of a point on the parabola is (at2, 2at)., The equations x = at² & y = 2at together represents the parabola y² = 4ax, t being the parameter. The, equation of a chord joining t1 & t2 is 2x − (t1 + t2) y + 2 at1 t2 = 0., Note: If chord joining t1, t2 & t3, t4 pass a through point (c, 0) on axis, then t1t2 = t3t4 = − c/a., 9., TANGENTS TO THE PARABOLA y2 = 4ax :, a 2a , (i), y y1 = 2 a (x + x1) at the point (x1, y1) ;, (ii), y = mx + a (m ≠ 0) at 2 ,, , m, m m , 2, (iii), t y = x + a t² at (at , 2at)., Note : Point of intersection of the tangents at the point t1 & t2 is [ at1 t2, a(t1 + t2) ]., 10., NORMALS TO THE PARABOLA y2 = 4ax :, y − y1 = − y1 (x − x1) at (x1, y1) ; (ii), (i), y = mx − 2am − am3 at (am2, − 2am), 6., , 17., , Note:, (i), The tangent at the extremity of a diameter of a parabola is parallel to the system of chords it bisects., (ii), The tangent at the ends of any chords of a parabola meet on the diameter which bisects the chord., (iii), A line segment from a point P on the parabola and parallel to the system of parallel chords is called the, ordinate to the diameter bisecting the system of parallel chords and the chords are called its double ordinate., 18., IMPORTANT HIGHLIGHTS :, (a), If the tangent & normal at any point ‘P’ of the parabola intersect the axis at T & G then, ST = SG = SP where ‘S’ is the focus. In other words the tangent and the normal at a point P on the parabola, are the bisectors of the angle between the focal radius SP & the perpendicular from P on the directrix., From this we conclude that all rays emanating from S will become parallel to the axis of the parabola after, reflection., (b), The portion of a tangent to a parabola cut off between the directrix & the curve subtends a right angle at, the focus.www.MathsBySuhag.com , www.TekoClasses.com, (c), The tangents at the extremities of a focal chord intersect at right angles on the directrix, and hence a circle, on any focal chord as diameter touches the directrix. Also a circle on any focal radii of a point P (at2, 2at), as diameter touches the tangent at the vertex and intercepts a chord of length a 1 + t 2 on a normal at the, point P., (d), Any tangent to a parabola & the perpendicular on it from the focus meet on the tangtent at the vertex., (e), If the tangents at P and Q meet in T, then :� TP and TQ subtend equal angles at the focus S., �, ST2 = SP. SQ &�, The triangles SPT and STQ are similar., (f), Tangents and Normals at the extremities of the latus rectum of a parabola, y2 = 4ax constitute a square, their points of intersection being (−a, 0) & (3 a, 0)., (g), Semi latus rectum of the parabola y² = 4ax, is the harmonic mean between segments of any focal chord of, 1 1 1, 2bc, the parabola is ; 2a =, i.e. + = ., b c a, b+c, (h), The circle circumscribing the triangle formed by any three tangents to a parabola passes through the focus., (i), The orthocentre of any triangle formed by three tangents to a parabola y2 = 4ax lies on the directrix & has, the co-ordinates − a, a (t1 + t2 + t3 + t1t2t3)., (j), The area of the triangle formed by three points on a, parabola is twice the area of the triangle formed by, the tangents at these points., (k), If normal drawn to a parabola passes through a point, P(h, k) then, k = mh − 2am − am3 i.e. am3 + m(2a − h) + k = 0., Then gives m1 + m2 + m3 = 0 ; m1 m2 + m2 m3 +, 2a − h, k, ; m1 m2 m 3 = − ., m3 m1 =, a, a, where m1, m2, & m3 are the slopes of the three, concurrent normals. Note that the algebraic sum of, the:, �, slopes of the three concurrent normals, is zero., �, ordinates of the three conormal points on the, parabola is zero., �, Centroid of the ∆ formed by three co-normal points lies on the x-axis., (l), A circle circumscribing the triangle formed by three co−normal points passes through the vertex of the, parabola and its equation is, 2(x2 + y2) − 2(h + 2a)x − ky = 0, Suggested problems from S.L.Loney: Exercise-25 (Q.5, 10, 13, 14, 18, 21), Exercise-26 (Important) (Q.4, 6, 7,, 16, 17, 20, 22, 26, 27, 28, 34, 38), Exercise-27 (Q.4, 7), Exercise-28 (Q.2, 7, 11, 14, 17, 23),, Exercise-29 (Q.7, 8, 10, 19, 21, 24, 26, 27), Exercise-30 (2, 3, 13, 18, 20, 21, 22, 25, 26, 30), Note: Refer to the figure on Pg.175 if necessary., , N, , AI, , M, , JE, E, , 12., , The equation to the pair of tangents which can be drawn from any point (x1, y1) to the parabola y² = 4ax is, given by : SS1 = T2 where :, S ≡ y2 − 4ax ;, S1 = y12 − 4ax1 ;, T ≡ y y1 − 2a(x + x1)., , 13., , DIRECTOR CIRCLE :, Locus of the point of intersection of the perpendicular tangents to the parabola y² = 4ax is called the, DIRECTOR CIRCLE. It’s equation is x + a = 0 which is parabola’s own directrix., CHORD OF CONTACT : www.MathsBySuhag.com , www.TekoClasses.com, Equation to the chord of contact of tangents drawn from a point P(x1, y1) is yy1 = 2a (x + x1)., Remember that the area of the triangle formed by the tangents from the point (x1, y1) & the chord of, contact is (y12 − 4ax1)3/2 ÷ 2a. Also note that the chord of contact exists only if the point P is not inside., , 14., , 15., (i), , POLAR & POLE :, Equation of the Polar of the point P(x1, y1) w.r.t. the parabola y² = 4ax is,, y y1= 2a(x + x1), n 2am , (ii), The pole of the line lx + my + n = 0 w.r.t. the parabola y² = 4ax is ,−, ., 1 , 1, Note:, (i), The polar of the focus of the parabola is the directrix., (ii), When the point (x1, y1) lies without the parabola the equation to its polar is the same as the equation to the, chord of contact of tangents drawn from (x1, y1) when (x1, y1) is on the parabola the polar is the same as, the tangent at the point., (iii), If the polar of a point P passes through the point Q, then the polar of Q goes through P., (iv), Two straight lines are said to be conjugated to each other w.r.t. a parabola when the pole of one lies on the, other., (v), Polar of a given point P w.r.t. any Conic is the locus of the harmonic conjugate of P w.r.t. the two points is, , DIAMETER :, The locus of the middle points of a system of parallel chords of a Parabola is called a DIAMETER. Equation, to the diameter of a parabola is y = 2a/m, where m = slope of parallel chords., , .IN, FO, , 2a, , y + tx = 2at + at3 at (at2, 2at)., Point of intersection of normals at t1 & t2 are, a (t 12 + t 22 + t1t2 + 2) ; − a t1 t2 (t1 + t2)., THREE VERY IMPORTANT RESULTS :, If t1 & t2 are the ends of a focal chord of the parabola y² = 4ax then t1t2 = −1. Hence the co-ordinates at the, 2a , a, extremities of a focal chord can be taken as (at2, 2at) & 2 , − ., t , t, (b), If the normals to the parabola y² = 4ax at the point t1, meets the parabola again at the point t2, then, , 2, t 2 = − t1 + ., , t1 , , (c), If the normals to the parabola y² = 4ax at the points t1 & t2 intersect again on the parabola at the point 't3', then t1 t2 = 2 ; t3 = − (t1 + t2) and the line joining t1 & t2 passes through a fixed point (−2a, 0)., General Note :, (i), Length of subtangent at any point P(x, y) on the parabola y² = 4ax equals twice the abscissa of the point P., Note that the subtangent is bisected at the vertex., (ii), Length of subnormal is constant for all points on the parabola & is equal to the semi latus rectum., (iii), If a family of straight lines can be represented by an equation λ2P + λQ + R = 0 where λ is a parameter and, P, Q, R are linear functions of x and y then the family of lines will be tangent to the curve Q2 = 4 PR., (iii), Note :, 11., (a), , 16., , which any line through P cuts the conic., CHORD WITH A GIVEN MIDDLE POINT :, Equation of the chord of the parabola y² = 4ax whose middle point is, 2a, (x − x1). This reduced to T = S1, (x1, y1) is y − y1 =, y1, where T ≡ y y1 − 2a (x + x1) & S1 ≡ y12 − 4ax1.
Page 32 :
ELLIPSE, 4., , �(PN ) b Semi minor axis, = =, Hence “ If from each point of a, �(QN) a Semi major axis, circle perpendiculars are drawn upon a fixed diameter then the locus of the points dividing these, perpendiculars in a given ratio is an ellipse of which the given circle is the auxiliary circle”., PARAMETRIC REPRESENTATION :, , 5., , x 2 y2, +, = 1., a 2 b2, Where θ is a parameter. Not e that if P(θ) ≡ (a cos θ, b sin θ) is on the ellipse then ;, Q(θ) ≡ (a cos θ, a sin θ) is on the auxiliary circle., LINE AND AN ELLIPSE :, , on the ellipse (0 ≤ θ < 2 π)., , 2, 2, Standard equation of an ellipse referred to its principal axes along the co-ordinate axes is x + y = 1 ., a 2 b2, Where a > b & b² = a²(1 − e²) ⇒ a2 − b2 = a2 e2. Where e = eccentricity (0 < e < 1). FOCI : S ≡ (a e, 0) &, S′ ≡ (− a e, 0)., EQUATIONS OF DIRECTRICES :, , a, & x = −a ., e, e, VERTICES :, A′ ≡ (− a, 0) & A ≡ (a, 0) ., MAJOR AXIS :, The line segment A′ A in which the foci S′ & S lie is of length 2a & is called the major axis (a > b) of the, ellipse. Point of intersection of major axis with directrix is called the foot of the directrix (z)., MINOR AXIS :www.MathsBySuhag.com , www.TekoClasses.com, The y−axis intersects the ellipse in the points B′ ≡ (0, − b) & B ≡ (0, b). The line segment B′B of length 2b, (b < a) is called the Minor Axis of the ellipse., PRINCIPAL AXIS :, The major & minor axis together are called Principal Axis of the ellipse., CENTRE :, The point which bisects every chord of the conic drawn through it is called the centre of the conic. C ≡ (0,, 2, 2, 0) the origin is the centre of the ellipse x + y = 1., a 2 b2, DIAMETER :, A chord of the conic which passes through the, centre is called a diameter of the conic., FOCAL CHORD : A chord which passes through, a focus is called a focal chord., DOUBLE ORDINATE :, A chord perpendicular to the major axis is called a, double ordinate., LATUS RECTUM : The, fo cal, cho rd, perpendicular to the major axis is called the latus, rectum . Length of lat us rect um (LL ′ ) =, , The equations x = a cos θ & y = b sin θ together represent the ellipse, , x=, , The line y = mx + c meets the ellipse, , x 2 y2, + 2 = 1 if c2 = a2m2 + b2., 2, a, b, The equation to the chord of the ellipse joining two points with eccentric angles α& β is given by, x, α+β y, α +β, α −β, cos, + sin, = cos, 2, a, 2, b, 2, 6., TANGENTS :, x x1 y y1, (i), + 2 = 1 is tangent to the ellipse at (x1, y1)., a2, b, Note :The figure formed by the tangents at the extremities of latus rectum is rhoubus of area, , .IN, FO, (ii), , N, , 2, , 2b, (minor axis ), =, = 2a (1 − e 2 ) = 2e (distance, a, major axis, from focus to the corresponding directrix), NOTE :, (i), The sum of the focal distances of any point on the ellipse is equal to the major Axis. Hence distance of, focus from the extremity of a minor axis is equal to semi major axis. i.e. BS = CA., , (ii), 2., , 2, 2, If the equation of the ellipse is given as x + y = 1 & nothing is mentioned, then the rule is to assume, a 2 b2, that a > b., POSITION OF A POINT w.r.t. AN ELLIPSE :, , The point P(x1, y1) lies outside, inside or on the ellipse according as ;, , 3., , x12, a2, , +, , y12, b2, , (iii), , (iv), , y = mx ± a 2 m 2 + b 2 is tangent to the ellipse for all values of m., Note that there are two tangents to the ellipse having the same m, i.e. there are two tangents parallel to any, given direction., x cos θ y sin θ, +, = 1 is tangent to the ellipse at the point (a cos θ, b sin θ)., a, b, The eccentric angles of point of contact of two parallel tangents differ by π. Conversely if the difference, between the eccentric angles of two points is p then the tangents at these points are parallel., cos α 2+ β, , (v), , Point of intersection of the tangents at the point α & β is a, , 7., , NORMALS :www.MathsBySuhag.com , www.TekoClasses.com, , (i), , a 2x b2 y, −, Equation of the normal at (x1, y1) is, = a² − b² = a²e²., x1, y1, , (ii), (iii), , 8., , 9., 10., , cos α 2− β, , ,b, , sin α 2+ β, , cos α 2− β, , ., , Equation of the normal at the point (acos θ, bsin θ) is ; ax. sec, θ − by. cosec θ = (a² − b²)., Equation of a normal in terms of its slope 'm' is y = mx −, , (a 2 − b 2 ) m, , − 1 > < or = 0., , AUXILIARY CIRCLE / ECCENTRIC ANGLE :, A circle described on major axis as diameter is called the, auxiliary circle., Let Q be a point on the auxiliary circle, x2 + y2 = a2 such that QP produced is perpendicular to the x-axis then P & Q are called as the CORRESPONDING, , x 2 y2, +, = 1 in two points real, coincident or imaginary according, a 2 b2, , as c2 is < = or > a2m2 + b2. Hence y = mx + c is tangent to the ellipse, , AI, , M, , JE, E, , 2, , Note that, , ., a 2 + b2m2, DIRECTOR CIRCLE :, Locus of the point of intersection of the tangents which meet, at right angles is called the Director Circle. The equation to this locus is x² + y² = a² + b² i.e. a circle, whose centre is the centre of the ellipse & whose radius is the length of the line joining the ends of the, major & minor axis., Chord of contact, pair of tangents, chord with a given middle point, pole & polar are to be interpreted as, they are in parabola., DIAMETER :, The locus of the middle points of a system of parallel chords with slope 'm' of an ellipse is a straight line
Page 33 :
x 2 y2, 11., IMPORTANT HIGHLIGHTS : Refering to an ellipse, + 2 = 1., 2, a, b, H − 1 If P be any point on the ellipse with S & S′ as its foci then, � (SP) + � (S′P) = 2a., , b2, x., a 2m, , 2., , 3., , the transverse axes of the other are called CONJUGATE HYPERBOLAS of each other. eg., , AI, , HYPERBOLA, 1., , JE, E, , M, , H − 7 Perpendiculars from the centre upon all chords which join the ends of any perpendicular diameters of the, ellipse are of constant length., H − 8 If the tangent at the point P of a standard ellipse meets the axis in T and t and CY is the perpendicular on, it from the centre then,, (i) T t. PY = a2 − b2, and, (ii) least value of Tt is a + b., , The HYPERBOLA is a conic whose eccentricity is greater than unity. (e > 1)., STANDARD EQUATION & DEFINITION(S), Standard equation of the hyperbola is, Where b2 = a2 (e2 − 1), or a2 e2 = a2 + b2 i.e. e2 = 1 +, C.A , =1+ , , T.A , FOCI :, S ≡ (ae, 0) &, , x 2 y2, −, = 1., a 2 b2, , b2, a2, , S′ ≡ (− ae, 0)., , EQUATIONS OF DIRECTRICES :, , x=, , a, e, , VERTICES : A ≡ (a, 0)& A′ ≡ (− a, 0). l (Latus rectum) =, , &, , a, x=− ., e, , 2b 2 (C.A.)2, =, = 2a (e2 − 1)., T.A., a, , &, , x 2 y2, +, = 1 are conjugate hyperbolas of each., a 2 b2, Note :(a)If e1& e2 are the eccentrcities of the hyperbola & its conjugate then e1−2 + e2−2 = 1., (b)The foci of a hyperbola and its conjugate are concyclic and form the vertices of a square., (c), Two hyperbolas are said to be similiar if they have the same eccentricity., 4., RECTANGULAR OR EQUILATERAL HYPERBOLA :, The particular kind of hyperbola in which the lengths of the transverse & conjugate axis are equal is called, , 5., , an EQUILATERAL HYPERBOLA. Note that the eccentricity of the rectangular hyperbola is, of its latus rectum is equal to its transverse or conjugate axis., AUXILIARY CIRCLE :www.MathsBySuhag.com , www.TekoClasses.com, A circle drawn with centre C & T.A. as a, diameter is called the AUXILIARY CIRCLE of the, hyperbola. Equation of the auxiliary circle is x2, + y2 = a2., Note from the figure that, P & Q are called the, "CORRESPONDING POINTS ", on the hyperbola & the auxiliary, circle. 'θ' is called the eccentric angle of the point 'P' on the hyperbola. (0 ≤ θ <2π)., , Note : The equations x = a sec θ & y = b tan θ together represents the hyperbola, , 2 and the length, , x 2 y2, −, =1, a 2 b2, , where θ is a parameter. The parametric equations : x = a cos h φ,, y = b sin h φ also represents the same hyperbola., General Note :, Since the fundamental equation to the hyperbola only differs from that to the ellipse in, having – b2 instead of b2 it will be found that many propositions for the hyperbola are derived from those, for the ellipse by simply changing the sign of b2., 6., POSITION OF A POINT 'P' w.r.t. A HYPERBOLA :, x12, , y12, , −, = 1 is positive, zero or negative according as the point (x1, y1) lies within, upon or, a 2 b2, without the curve., 7., LINE AND A HYPERBOLA, :, The straight line y = mx + c is a secant, a tangent or passes outside, x 2 y2, the hyperbola, + 2 = 1 according as: c2 > = < a2 m2 − b2., 2, a, b, 8., TANGENTS AND NORMALS : TANGENTS :, xx yy, x 2 y2, (a), at the point (x1, y1) is 21 − 21 = 1., Equation of the tangent to the hyperbola, −, =, 1, a, b, a 2 b2, Note: In general two tangents can be drawn from an external point (x1 y1) to the hyperbola and they are y − y1 = m1(x, , The quantity, , 2, , x 2 y2, −, =1, a 2 b2, , −, , N, , H − 2 The product of the length’s of the perpendicular segments, from the foci on any tangent to the ellipse is b2 and the feet, of these perpendiculars Y,Y′ lie on its auxiliary circle.The, tangents at these feet to the auxiliary circle meet on the, ordinate of P and that the locus of their point of intersection, is a similiar ellipse as that of the original one. Also the, lines joining centre to the feet of the perpendicular Y and, focus to the point of contact of tangent are parallel., H − 3 If the normal at any point P on the ellipse with centre C, meet the major & minor axes in G & g respectively, & if, CF be perpendicular upon this normal, then, (i), PF. PG = b2 (ii), PF. Pg = a2, (iii), PG. Pg = SP. S′ P, (iv), CG. CT = CS2, (v), locus of the mid point of Gg is another ellipse having the same eccentricity as that of the original ellipse., [where S and S′ are the focii of the ellipse and T is the point where tangent at P meet the major axis], H − 4 The tangent & normal at a point P on the ellipse bisect the external & internal angles between the focal, distances of P. This refers to the well known reflection property of the ellipse which states that rays from, one focus are reflected through other focus & vice−versa. Hence we can deduce that the straight lines, joining each focus to the foot of the perpendicular from the other focus upon the tangent at any point P, meet on the normal PG and bisects it where G is the point where normal at P meets the major axis., H − 5 The portion of the tangent to an ellipse between the point of contact & the directrix subtends a right angle, at the corresponding focus.www.MathsBySuhag.com , www.TekoClasses.com, H − 6 The circle on any focal distance as diameter touches the auxiliary circle., , Note : l (L.R.) = 2e (distance from focus to the corresponding directrix), TRANSVERSE AXIS : The line segment A′A of length 2a in which the foci S′ & S both lie is called the, T.A. OF THE HYPERBOLA., CONJUGATE AXIS : The line segment B′B between the two points B′ ≡ (0, − b) & B ≡ (0, b) is called as the, C.A. OF THE HYPERBOLA., The T.A. & the C.A. of the hyperbola are together called the Principal axes of the hyperbola., FOCAL PROPERTY :, The difference of the focal distances of any point on the hyperbola is constant and equal to transverse axis, i.e. PS − PS′ = 2a . The distance SS' = focal length., CONJUGATE HYPERBOLA :, Two hyperbolas such that transverse & conjugate axes of one hyperbola are respectively the conjugate &, , .IN, FO, , passing through the centre of the ellipse, called its diameter and has the equation y = −
Page 34 :
− x1) & y − y1 = m2(x − x2), where m1 & m2 are roots of the equation (x12 − a2)m2 − 2 x1y1m + y12 + b2 = 0. If, D < 0, then no tangent can be drawn from (x1 y1) to the hyperbola., , (b)Equation of the tangent to the hyperbola, , x, y, x sec θ y tan θ, − 2 = 1 at the point (a sec θ, b tan θ) is, −, = 1., 2, a, b, a, b, , θ +θ, θ1 − θ 2, sin 1 2, 2, 2 , y=b, Note : Point of intersection of the tangents at θ1 & θ2 is x = a, θ, +, θ, θ +θ, cos 1 2, cos 1 2, 2, 2, , cos, , x 2 y2, −, = 1 . Note that there are, a 2 b2, , (c), , y = mx ± a 2 m 2 − b 2 can be taken as the tangent to the hyperbola, , (d), , two parallel tangents having the same slope m., x, α −β y, α+β, α+β, − sin, = cos, Equation of a chord joining α & β is cos, 2, a, 2, b, 2, NORMALS:, , (a), , The equation of the normal to the hyperbola, , x 2 y2, a 2 x b2 y, at, the, point, P(x, ,, y, ), on, it, is, −, =, 1, +, = a 2 − b2, 1 1, 2, 2, x1, y1, a, b, , H− 1, , Locus of the feet of the perpendicular drawn from focus of the hyperbola, , H− 2, , The portion of the tangent between the point of contact & the directrix subtends a right angle at the, corresponding focus., , H− 3, , The tangent & normal at any point of a hyperbola bisect the, angle between the focal radii. This spells the reflection, property of the hyperbola as "An incoming light ray " aimed, towards one focus is, reflected from the outer surface of the hyperbola towards the other focus. It follows that if an ellipse and, a hyperbola have the same foci, they cut at right, angles at any of their common point., , JE, E, , M, , 9., , x 2 y2, −, = 1 upon any tangent is, a 2 b2, its auxiliary circle i.e. x2 + y2 = a2 & the product of the feet of these perpendiculars is b2 · (semi C ·A)2, , x 2 y2, x2, y2, Note that the ellipse 2 + 2 = 1 and the hyperbola, −, = 1 (a > k > b > 0) Xare confocal and, a, b, a 2 −k 2 k 2 −b 2, therefore orthogonal., H− 4, , point on a hyperbola to a straight line tends to zero as the point on the hyperbola moves to infinity along, the hyperbola, then the straight line is called the Asymptote of the Hyperbola., To find the asymptote of the hyperbola :, x 2 y2, Let y = mx + c is the asymptote of the hyperbola 2 − 2 = 1 ., a, b, Solving these two we get the quadratic as, (b2− a2m2) x2− 2a2 mcx − a2 (b2 + c2) = 0, ....(1), In order that y = mx + c be an asymptote, both roots of equation (1) must approach infinity, the conditions, for which are :, ⇒, b2 − a2m2 = 0 or m = ± b &, coeff of x2 = 0 & coeff of x = 0., a, x, y, x y, a2 mc = 0 ⇒ c = 0., ∴ equations of asymptote are + = 0 and, − = 0., a b, a b, x 2 y2, combined equation to the asymptotes 2 − 2 = 0 ., a, b, PARTICULAR CASE :, When b = a the asymptotes of the rectangular hyperbola. x2 − y2 = a2 are, y = ± x which are at right angles., Note :, (i), Equilateral hyperbola ⇔ rectangular hyperbola., (ii), If a hyperbola is equilateral then the conjugate hyperbola is also equilateral., (iii), A hyperbola and its conjugate have the same asymptote., (iv), The equation of the pair of asymptotes differ the hyperbola & the conjugate hyperbola by the same constant, only., (v), The asymptotes pass through the centre of the hyperbola & the bisectors of the angles between the, asymptotes are the axes of the hyperbola.www.MathsBySuhag.com , www.TekoClasses.com, (vi), The asymptotes of a hyperbola are the diagonals of the rectangle formed by the lines drawn through the, extremities of each axis parallel to the other axis., (vii) Asymptotes are the tangent to the hyperbola from the centre., (viii) A simple method to find the coordinates of the centre of the hyperbola expressed as a general equation of, degree 2 should be remembered as:, Let f (x, y) = 0 represents a hyperbola., ∂f, ∂f, ∂f, ∂f, Find, =0, gives the centre of t he, &, . Then the point of intersection of, =0&, ∂x, ∂x, ∂y, ∂y, hyperbola., 12., HIGHLIGHTS ON ASYMPTOTES:, H−1 If from any point on the asymptote a straight line be drawn perpendicular to the transverse axis, the, product of the segments of this line, intercepted between the point & the curve is always equal to the, square of the semi conjugate axis., H−2 Perpendicular from the foci on either asymptote meet it in the same points as the corresponding directrix, & the common points of intersection lie on the auxiliary circle., , AI, , (c), , ASYMPTOTES :Definition : If the length of the perpendicular let fall from a, , N, , 10., , = a2 e2., x 2 y2, The equation of the normal at the point P (a secθ, b tanθ) on the hyperbola 2 − 2 = 1 is, a, b, ax, by, +, = a 2 + b 2 = a2 e2., sec θ tan θ, Equation to the chord of contact, polar, chord with a given middle point, pair of tangents from an external, point is to be interpreted as in ellipse.www.MathsBySuhag.com , www.TekoClasses.com, DIRECTOR CIRCLE :, The locus of the intersection of tangents which are at right angles is known as the DIRECTOR CIRCLE of the, hyperbola. The equation to the director circle is : x2 + y2 = a2 − b2., If b2 < a2 this circle is real; if b2 = a2 the radius of the circle is zero & it reduces to a point circle at the origin., In this case the centre is the only point from which the tangents at right angles can be drawn to the curve. If b2, > a2, the radius of the circle is imaginary, so that there is no such circle & so no tangents at right angle can, be drawn to the curve., HIGHLIGHTS ON TANGENT AND NORMAL :, , (b), , 11., , 2, , .IN, FO, , 2, , The foci of the hyperbola and the points P and Q in which any tangent meets the tangents at the vertices, are concyclic with PQ as diameter of the circle., , H− 3, , x 2 y2, −, = 1 with centre C, meets the asymptotes in Q and R and, a 2 b2, cuts off a ∆ CQR of constant area equal to ab from the asymptotes & the portion of the tangent intercepted, between the asymptote is bisected at the point of contact. This implies that locus of the centre of the circle, circumscribing the ∆ CQR in case of a rectangular hyperbola is the hyperbola itself & for a standard, hyperbola the locus would be the curve, 4(a2x2 − b2y2) = (a2 + b2)2., , The tangent at any point P on a hyperbola, , x 2 y2, −, = 1 is 2θ then e = secθ., a 2 b2, 13.RECTANGULAR HYPERBOLA :Rectangular hyperbola referred to its asymptotesas, axis of coordinates.(a)Eq. is xy = c2 with parametric representation x = ct, y = c/t, t ∈ R – {0}., H− 4, , If the angle between the asymptote of a hyperbola
Page 35 :
(b), , Eq.of a chord joining the points (t1) & (t2) is x + t1t2y = c(t1 + t2) with slope m = –, Equation of the tangent at P (x1, y1) is, , (c), , 1, ., t 1t 2, , (iii), , x, x y, + = 2 & at P (t) is + ty = 2c., t, x1 y1, , (iv), , c, = t2(x – ct), t, Chord with a given middle point as (h, k) is kx + hy = 2hk., , (d), , Equation of normal : y –, , 6., , 20.BINOMIAL EXPONENTIAL &, LOGARITHMIC SERIES, 1., , BINOMIAL THEOREM : The formula by which any positive integral power of a binomial, expression can be expanded in the form of a series is known as BINOMIAL THEOREM ., If x , y ∈ R and n ∈ N, then ;, n, , (x + y)n = nC0 xn + nC1 xn−1 y + nC2 xn−2y2 + ..... + nCr xn−ryr + ..... + nCnyn =, , ∑ nCr xn – r yr., r=0, , n, , 1, , x x 2 x3, 1 + , +, + .......∞ ; where x may be any real or complex & e = Limit, (i), =1+ +, n→∞ , n, 1! 2! 3!, x, x2 2, x3 3, ln a +, ln a + .......∞ where a > 0, (ii), ax = 1 + ln a +, 1!, 2!, 3!, 1 1 1, Note :, (a), e = 1 + + + +.......∞, 1! 2! 3!, (b), e is an irrational number lying between 2.7 & 2.8. Its value correct upto 10 places of decimal is, 2.7182818284., 1 1 1, , 1 1 1, , (c), e + e−1 = 2 1 + + + + .......∞ (d), e − e−1 = 2 1 + + + + .......∞ , 2! 4! 6!, , 3! 5! 7!, , (e), Logarithms to the base ‘e’ are known as the Napierian system, so named after Napier, their inventor. They, are also called Natural Logarithm., 8., LOGARITHMIC SERIES :, , ex, , N, , This theorem can be proved by Induction .www.MathsBySuhag.com , www.TekoClasses.com, OBSERVATIONS :(i)The number of terms in the expansion is (n + 1) i.e. one or more than, the index .(ii) The sum of the indices of x & y in each term is n (iii), The binomial, coefficients of the terms nC0 , nC1 .... equidistant from the beginning and the end are equal., 2., IMPORTANT TERMS IN THE BINOMIAL EXPANSION ARE :, (i), General term (ii), Middle term(iii)Term independent of x &, (iv), Numerically greatest, term, (i), The general term or the (r + 1)th term in the expansion of (x + y)n is given by ;, Tr+1 = nCr xn−r . yr, (ii), The middle term(s) is the expansion of (x + y)n is (are) :, (a), If n is even , there is only one middle term which is given by ;, T(n+2)/2 = nCn/2 . xn/2 . yn/2, (b), If n is odd , there are two middle terms which are :, T(n+1)/2 & T[(n+1)/2]+1, (iii), Term independent of x contains no x ; Hence find the value of r for which the exponent of x is zero., (iv), To find the Numerically greatest term is the expansion of (1 + x) n , n ∈ N find, n, Tr +1, Cr x r, n − r +1, = n, =, x . Put the absolute value of x & find the value of r Consistent with the, r −1, r, Tr, C r −1x, T, inequality r +1 > 1., Tr, Note that the Numerically greatest term in the expansion of (1 − x)n , x > 0 , n ∈ N is the same as, the greatest term in (1 + x)n ., 3. If A + B n = I + f, where I & n are positive integers, n being odd and 0 < f < 1, then, , 7., , .IN, FO, , (e), , x 2 x3 x 4, +, −, + ....... ∞ where −1 < x ≤ 1, 2, 3, 4, x 2 x3 x 4, −, −, + ....... ∞ where −1 ≤ x < 1, (ii), ln (1− x) = − x −, 2, 3, 4, , , x3 x5, (1 + x ), , x, +, +, + ......∞ x < 1, (iii), ln, =2 , 3, 5, (1− x ), , , 1 1 1, REMEMBER : (a), 1 − + − +... ∞ = ln 2, (b), eln x = x, 2 3 4, (c), ln2 = 0.693, (d), ln10 = 2.303, , (i), , AI, , M, , JE, E, , (, , ), , (I + f) . f =, where A −, = K > 0 & A − B < 1., If n is an even integer, then (I + f) (1 − f) = Kn., Kn, , B2, , 4., (ii), , BINOMIAL COEFFICIENTS : (i), C0 + C1 + C2 + ....... + Cn = 2n, C0 + C2 + C4 + ....... = C1 + C3 + C5 + ....... = 2n−1, , (iii), , C0² + C1² + C2² + .... + Cn² = 2nCn =, , (2 n) !, n! n!, , (2n )!, (n + r ) (n − r )!, REMEMBER :, (i), (2n)! = 2n . n! [1. 3. 5 ...... (2n − 1)], 5., BINOMIAL THEOREM FOR NEGATIVE OR FRACTIONAL INDICES, n (n − 1) 2 n (n − 1) (n − 2) 3, x +, x +......∞ Provided | x | < 1., If n ∈ Q , then (1 + x)n = 1 + n x +, 2!, 3!, Note : (i)When the index n is a positive integer the number of terms in the expansion of, (1 + x)n is finite i.e. (n + 1) & the coefficient of successive terms are :, nC , nC , nC , nC ..... nC, 0, 1, 2, 3, n, (ii), When the index is other than a positive integer such as negative integer or fraction, the number of, terms in the expansion of (1 + x)n is infinite and the symbol nCr cannot be used to denote the, , (iv), , C0.Cr + C1.Cr+1 + C2.Cr+2 + ... + Cn−r.Cn =, , Coefficient of the general term ., Following expansion should be remembered (x < 1)., (a) (1 + x)−1 = 1 − x + x2 − x3 + x4 − .... ∞(b) (1 − x)−1 = 1 + x + x2 + x3 + x4 + .... ∞, (c) (1 + x)−2 = 1 − 2x + 3x2 − 4x3 + .... ∞(d) (1 − x)−2 = 1 + 2x + 3x2 + 4x3 + ..... ∞, The expansions in ascending powers of x are only valid if x is ‘small’. If x is large i.e. | x | > 1 then we, 1, may find it convinient to expand in powers of, , which then will be small., x, n (n − 1), n (n − 1) (n − 2) 3, APPROXIMATIONS :(1 + x)n = 1 + nx +, x² +, x ....., 1.2, 1.2.3, If x < 1, the terms of the above expansion go on decreasing and if x be very small, a stage may be, reached when we may neglect the terms containing higher powers of x in the expansion. Thus, if x be, so small that its squares and higher powers may be neglected then (1 + x)n = 1 + nx, approximately., This is an approximate value of (1 + x)n., EXPONENTIAL SERIES :www.MathsBySuhag.com , www.TekoClasses.com, , ln (1+ x) = x −, , 21. VECTOR & 3-D, 1., , DEFINITIONS:, A VECTOR may be described as a quantity having both magnitude & direction. A vector is generally, →, , represented by a directed line segment, say AB . A is called the initial point & B is called the terminal, →, , →, , point. The magnitude of vector AB is expressed by AB ., ZERO VECTOR a vector of zero magnitude i.e.which has the same initial & terminal point, is called a ZERO, VECTOR. It is denoted by O., �, �, UNIT VECTOR a vector of unit magnitude in direction of a vector a is called unit vector along a and is, �, a, denoted by â symbolically â= � . EQUAL VECTORS two vectors are said to be equal if they have the same, a, magnitude, direction & represent the same physical quantity. COLLINEAR VECTORS two vectors are said to, be collinear if their directed line segments are parallel disregards to their direction. Collinear vectors are, also called PARALLEL VECTORS. If they have the same direction they are named as like vectors otherwise
Page 36 :
�, , →, , OC , where OC is the diagonal of the parallelogram OACB., , � � � �, � � � � � �, �, a + b = b + a (commutative), (a + b) + c = a + ( b + c) (associativity), � � � � �, �, � �, � �, �, �, a + 0=a =0 + a, a + ( − a ) = 0 = ( − a )+ a, 3., MULTIPLICATION OF VECTOR BY SCALARS :, �, �, �, If a is a vector & m is a scalar, then m a is a vector parallel to a whose, �, modulus is m times that of a . This multiplication is called SCALAR, � �, MULTIPLICATION. If a & b are vectors & m, n are scalars, then:, �, �, �, m(a ) = (a )m = ma, �, �, �, m(na ) = n(ma ) = (mn )a, �, �, �, �, � �, �, ( m + n )a = ma + na, m(a + b) = ma + mb, 4., SECTION FORMULA :, �, �, If a & b are the position vectors of two points A & B then the p.v. of a point, �, �, � na + mb, . Note p.v.., which divides AB in the ratio m : n is given by : r =, m+n, � �, a+b, of mid point of AB =, 2, 5., DIRECTION COSINES :www.MathsBySuhag.com , www.TekoClasses.com, �, Let a = a1î + a 2 ĵ + a 3k̂ the angles which this vector makes with the +ve directions OX,OY & OZ are, , �, �, (a ≠ 0 b ≠ 0), �, � a�.b, �, �, projection of a on b = � ., î . î = ˆj. ˆj = k̂ . k̂ = 1 ; î . ˆj = ˆj. k̂ = k̂ . î = 0 �, b, �, � � �, �, Note: That vector component of a along b = a �⋅ b b, b2 , � �, �, � a ⋅ b �, and perpendicular to b = a – � b .www.MathsBySuhag.com , www.TekoClasses.com, b2 , � �, �, �, a .b, �, the angle φ between a & b is given by cos φ = � �, 0≤φ≤π, ab, �, �, ��, �, if a = a1î + a 2 ĵ + a 3k̂ & b = b1î + b 2 ĵ + b3k̂ then a.b = a1b1 + a2b2 + a3b3, �, a = a 12 + a 2 2 + a 3 2, , Note :, (ii), , (iii), (iv), , AI, , M, , JE, E, a, , called DIRECTION ANGLES & their cosines are called the DIRECTION COSINES . cos α = �1, a, , a, cos Γ= �3 ., a, , ,, , 6., , a, , , cos β= �2, a, , Note that, cos² α + cos² β + cos² Γ = 1, , VECTOR EQUATION OF A LINE :, Parametric vector equation of a line passing through two point, �, � �, �, � �, A(a ) & B(b) is given by, r = a + t (b − a ) where t is a parameter. If, �, the line passes through the point A (a ) & is parallel to the vector, �, � � �, b then its equation is, r = a + t b, , 7., , 8., �, , ( ), , �, , �, , Maximum value, � �, Minimum values of a . b =, �, Any vector a can be written, , �, � �, �, of a . b = a b , �, � �, �, a . b = − a b , �, �, �, �, as , a = a . �i �i + a . �j �j + a . k� k� ., , ( ) ( ) ( ), , �, �, a, b, � �, A vector in the direction of the bisector of the angle between the two vectors a & b is � + � . Hence, a, b, � �, bisector of the angle between the two vectors a & b is λ a� + b� , where λ ∈ R+. Bisector of the exterior, �, , (, , �, , (, , ), , ), , angle between a & b is λ a� − b� , λ ∈ R+ ., , VECTOR PRODUCT OF TWO VECTORS :, � � ��, �, �, � �, If a & b are two vectors & θ is the angle between them then a × b = a b sin θn , where n, � � �, � �, is the unit vector perpendicular to both a & b such that a ,b&n forms a right handed screw system, ., � �, � � � �, �2 �2 � �, a .a, Lagranges Identity : for any two vectors a & b ;(a x b) 2 = a b − (a . b) 2 = � �, a .b, , (iii) �, , �, , �, , (i) �, , �, b = b12 + b 2 2 + b 3 2, , ,, , (i), , (ii) �, , �, , �, , �, , �, , �, , �, , Note that the equations of the bisectors of the angles between the lines r = a + λ b & r = a + µ c is : r, , ( ), , = a + t b� + c� & r = a + p c� − b� ., TEST OF COLLINEARITY :, , 9., , ��, � �, a.b = 0 ⇔ a ⊥ b, , � � �, � � � �, a . (b + c) = a . b + a . c (distributive) �, , �, , N, , �, , �� �2 � �� ��, a.a = a =a 2 ,a.b=b.a (commutative), , .IN, FO, , 2., , �, � �, �, unlike vectors. Simbolically, two non zero vectors a and b are collinear if and only if, a=Kb , where, K ∈ R COPLANAR VECTORS a given number of vectors are called coplanar if their line segments are all, parallel to the same plane. Note that “TWO VECTORS ARE ALWAYS COPLANAR”. POSITION VECTOR let O, →, �, �, be a fixed origin, then the position vector of a point P is the vector OP . If a & b & position vectors of, � �, →, two point A and B, then ,, AB = b − a = pv of B − pv of A ., VECTOR ADDITION :, �, →, →, � �, �, If two vectors a & b are represented by OA&OB , then their sum a + b is a vector represented by, , � � �, Three points A,B,C with position vectors a , b, c respectively are collinear, if & only if there exist scalars, � �, �, x , y , z not all zero simultaneously such that ; xa + yb + zc = 0 , where x + y + z = 0., SCALAR PRODUCT OF TWO VECTORS :, ��, ��, �� � �, a.b = a b cos θ(0 ≤ θ ≤ π) , note that if θ is acute then a.b > 0 & if θ is obtuse then a.b < 0, �, , � �, a .b, � �, b.b, , Formulation of vector product in terms of scalar product:, � �, �, The vector product a x b is the vector c , such that, �, �, �, � �, � �, � � �, (i) | c | = a� 2 b 2 − (a� ⋅ b) 2 (ii) c ⋅ a = 0; c ⋅ b =0 and (iii) a , b, c form a right handed system, �, �, �, �, � �, � �, (iv) � a × b = 0 ⇔ a & b are parallel (collinear) (a ≠ 0, b ≠ 0) i.e. a = Kb , where K is a scalar.., � �, � a� × b ≠ b × a�, (not commutative), �, �, �, �, � �, � (ma ) × b = a × (mb) = m(a × b) where m is a scalar ., � � �, � �, � �, � a × ( b + c ) = (a × b) + (a × c ), (distributive), � î × î = ˆj × ˆj = k̂ × k̂ = 0, �, î × ˆj = k̂ , ˆj × k̂ = î , k̂ × î = ˆj, , (v) �, , �, If a = a1î + a 2 ĵ + a 3k̂ &, , ˆj, î, �, � �, b = b1î + b 2 ĵ + b3k̂ then a × b = a1 a 2, b1 b 2, , k̂, a3, b3
Page 37 :
� �, �Geometrically a × b = area of the parallelogram whose two adjacent sides are represented by, � �, a &b ., � �, � �, a×b, (vii) �, Unit vector perpendicular to the plane of a & b is n̂ = ± � �, a×b, � �, � �, r a×b, �, A vector of magnitude ‘r’ & perpendicular to the palne of a & b is ± � �, a×b, �, �, a×b, � �, �, If θ is the angle between a & b then sin θ = � �, a b, �, �, �, (viii) Vector area �, If a,b&c are the pv’s of 3 points A, B & C then the vector area of triangle ABC, , (vi), , ( ), , 10., , ], , →, , [ ], , (, , 11., �, , �, �, , �, �, , �, , �, �, �, If a = a1î + a 2 ĵ + a 3k̂ ; b = b1î + b 2 ĵ + b3k̂ & c = c1î + c 2 ĵ + c3k̂ then ., �, �, �, �, �, �, �, �, In general , if a = a 1 l + a 2 m + a 3 n ; b = b1 l + b 2 m + b 3 n, , &, , ���, , ���, ���, [ Ka b c ] = K[ a b c ], , ���, [a b c] < 0, , ���, � � ��, ���, [(a + b) c d ] = [ a c d ] + [ b c d ], � � �, The volume of the tetrahedron OABC with O as origin & the pv’s of A, B and C being a , b & c respectively, , �, , [i j k] = 1, , �, , 1 ���, [a b c], 6, , � � �, , �, , The positon vector of the centroid of a tetrahedron if the pv’s of its angular vertices are a , b , c & d are, given by, , 1 � � � �, [a + b + c + d] ., 4, , Note that this is also the point of concurrency of the lines joining the vertices to the centroids of the, opposite faces and is also called the centre of the tetrahedron. In case the tetrahedron is regular it is, equidistant from the vertices and the four faces of the tetrahedron ., , N, , �, �, �, �, c = c1 l + c2 m + c3 n, , ���, , is given by V =, , SCALAR TRIPLE PRODUCT / BOX PRODUCT / MIXED PRODUCT :, � � �, The scalar triple product of three vectors a ,b&c is defined as :, �, �, � �� � � �, �, a xb.c= a b c sin θ cos φ where θ is the angle between a & b & φ is the angle between a� × b & c� . It, ���, 13., is also defined as [a bc] , spelled as box product ., Scalar triple product geometrically represents the volume of the parallelopiped whose three couterminous, �� �, ���, edges are represented by a,b&c i.e.V=[a bc], In a scalar triple product the position of dot & cross can be interchanged i.e., (a), � ��, � � �, � � �, ���, �� �, a.( bxc )=(a xb).c OR[a bc]=[bca]=[ca b], � � �, � � �, ���, ���, a . (b x c) = − a .( cx b) i. e. [ a b c ] = − [ a c b ], , ���, , � � �, , � � �, , � � �, � � �, �, � �, b x(a 2 − a 1 ), If two lines are given by r1 = a 1 + Kb & r2 = a 2 + Kb i.e. they are parallel then , d =, �, b, , �, , �, , Note : If a , b , c are non − coplanar then [ a b c ] > 0 for right handed system &, for left handed system ., , JE, E, , 2., , [( ) ], , ), , � �, , ; where � , m & n are non coplanar vectors ., , Scalar product of three vectors, two of which are equal or parallel is 0 i.e. [ a b c ] = 0 ,, , AI, , �, �, The two lines directed along p & q will intersect only if shortest distance = 0 i.e., � � ��, � �, � � � �, �, �, (b − a ).(p xq) = 0 i.e. b − a lies in the plane containing p & q . ⇒ b − a p q = 0, , �, , �, , M, , 1., , [ l m� n� ], , If a , b , c are coplanar ⇔ [ a b c ] = 0 ., , vector would be equal to that of the projection of AB along the direction of the line of shortest distance,, →, →, →, →, →, � � *12., � �, LM = Pr ojection of AB on LM = Pr ojection of AB on px q, i.e., LM is parallel to p x q, →, � � � �, � �, AB . (p x q), (b − a ) . (p xq), =, =, www.MathsBySuhag.com , www.TekoClasses.com, � �, � �, pxq, pxq, , a3, b3, c3, , �, , �, , SHORTEST DISTANCE BETWEEN TWO LINES :, If two lines in space intersect at a point, then obviously the shortest distance between them is zero. Lines, which do not intersect & are also not parallel are called SKEW LINES. For Skew lines the direction of, the shortest distance would be perpendicular to both the lines. The magnitude of the shortest distance, , a2, b2, c2, , .IN, FO, , �, , [, , � �, � �, � �, 1 � �, a x b + b x c + cx a . The points A, B & C are collinear if a� x b + b x �c + �cx a� = 0, 2, �, �, 1 � �, Area of any quadrilateral whose diagonal vectors are d1 &d 2 is given by d1 xd 2, 2, , =, , a1, ���, then a b c = b1, c1, , (b), , (c), , [�, , �, , � �, , � �, , ], , Remember that : a − b b − c c − a = 0, , [a� + b, �, , &, , [, , ], , � � � �, � ��, b+ c c+a = 2 a b c ., , ], , VECTOR TRIPLE PRODUCT :, � �, � � �, �, Let a ,b,c be any three vectors, then the expression a × ( b × c) is a vector & is called a vector triple, product .www.MathsBySuhag.com , www.TekoClasses.com, � �, �, GEOMETRICAL INTERPRETATION OF a × ( b × c), � �, �, Consider the expression a × ( b × c) which itself is a vector, since it is a cross product of two vectors, , � �, � �, � �, � �, �, �, �, a & ( b x c ) . Now a x ( b x c ) is a vector perpendicular to the plane containing a & ( b x c ) but b x c is a, � �, � �, � �, �, vector perpendicular to the plane b&c , therefore a x ( b x c ) is a vector lies in the plane of b&c and, � �, � �, �, �, perpendicular t o a . Hence we can express a x ( b x c ) in t erms of b & c, � �, �, �, �, i.e. a x ( b x c ) = xb + yc where x & y are scalars ., � � �, � �, � � �, �, � � �, � � �, � � �, �, a x ( b x c ) = (a . c) b − (a . b) c �, (a x b) x c = (a . c) b − (b . c) a, � � �, � � �, �, (a x b) x c ≠ a x (b x c), , LINEAR COMBINATIONS / Linearly Independence and Dependence of Vectors :, � �, � � �, � �, Given a finite set of vectors a , b , c ,...... then the vector r =xa + yb+ zc +........ is called a linear, � � �, , combination of a , b , c ,...... for any x, y, z ...... ∈ R. We have the following results :, �, ��, FUNDAMENTALTHEOREM IN PLANE : Let a,b be non zero , non collinear vectors . Then any vector r, ��, ��, coplanar with a,b can be expressed uniquely as a linear combination of a,b i.e. There exist some unique, � �, �, x,y ∈ R such that xa + yb=r ., ���, FUNDAMENTAL THEOREM IN SPACE : Let a,b,c be non−zero, non−coplanar vectors in space. Then any, �, ���, vector r , can be uniquily expressed as a linear combination of a,b,c i.e. There exist some unique x,y ∈, �, �, � �, R such that xa + yb+ zc= r ., � �, , �, , If x1,x 2 ,......x n are n non zero vectors, & k1, k2, .....kn are n scalars & if the linear combination
Page 38 :
�, �, �, k1x1 + k 2 x 2 + ........k n x n = 0 ⇒ k1 = 0,k 2 = 0.....k n = 0 then we say that vectors, , (d), , � �, �, x1,x 2 ,......x n are, , LINEARLY INDEPENDENT VECTORS ., � �, �, If x1,x 2 ,......x n are not LINEARLY INDEPENDENT then they are said to be LINEARLY DEPENDENT vectors, ., , i . e ., , i f, , (2), , �, �, �, � �, �, k1x1 + k 2 x 2 +........+ k n x n = 0 & if there exists at least one kr ≠ 0 then x1,x 2 ,......x n are, , said to be LINEARLY DEPENDENT ., , Note :, �, �, , �, , �, , �, �, �, If a = 3i + 2j + 5k then a is expressed as a LINEAR COMBINATION of vectors î , ˆj, k̂ . Also , a , î , ˆj, k̂ form, a linearly dependent set of vectors. In general , every set of four vectors is a linearly dependent system., î , ˆj , k̂ are LINEARLY INDEPENDENT set of vectors. For, , (3), (a), , K1î + K 2 ĵ + K 3k̂ = 0 ⇒ K1 = 0 = K2 = K3., �, �, � �, � �, Two vectors a &b are linearly dependent ⇒ a is parallel to b i.e. a xb= 0 ⇒ linear dependence of, � �, � �, � �, a &b . Conversely if a xb≠0 then a &b are linearly independent ., � � �, � � �, If three vectors a ,b,c are linearly dependent, then they are coplanar i.e. [ a , b, c ] = 0 , conversely, if, , (b), , systems are called Reciprocal System of vectors., , Note :, , � �, bx c, a'= � � � ; b' =, abc, , [ ], , � �, cx a, � � � ; c' =, abc, , [ ], , � �, axb, ���, abc, , [ ], , 16., , EQUATION OF A PLANE :www.MathsBySuhag.com , www.TekoClasses.com, , (a), , The equation ( r − r0 ).n =0 represents a plane containing the point with p.v. r0 wheren is a vector, � �, normal to the plane . r . n = d is the general equation of a plane., Angle between the 2 planes is the angle between 2 normals drawn to the planes and the angle between a, line and a plane is the compliment of the angle between the line and the normal to the plane., , 17., , �, , �, , �, , M, , �, , APPLICATION OF VECTORS :, , JE, E, , (b), , �, , �, Work done against a constant force F over adisplacement, � ��, �, s is defined as W=F.s, �, � � �, �, (b), The tangential velocity V of a body moving in a circle is given by V = w × r where r is the pv of the, point P., �, � � �, �, (c), The moment of F about ’O’ is defined as M = r × Fwhere r is the, �, pv of P wrt ’O’. The direction of M is along the normal to the, �� �, plane OPN such that r ,F&M form a, right handed system., �, �, �, � �, (d), Moment of the couple = ( r1 − r2 ) × F where r1 & r2 are pv’s of the point of the application of the forces, �, �, F&− F., 3 -D COORDINATE GEOMETRY, , (a), , USEFUL RESULTS, A, General :, (1), , Distance (d) between two points (x1 , y1 , z1) and (x2 , y2 , z2), , note that if three lines are coplanar then, , l1, l2, l3, , m1, m2, m3, , n1, n2 = 0, n3, , (4)Projection of join of 2 points on line with d.c's l, m, n are l (x2 – x1) + m(y2 – y1) + n(z2 – z1), B, PLANEwww.MathsBySuhag.com , www.TekoClasses.com, (i), General equation of degree one in x, y, z i.e. ax + by + cz + d = 0 represents a plane., (ii), Equation of a plane passing through (x1 , y1 , z1) is, a (x – x1) + b (y – y1) + c (z – z1) = 0 where a, b, c are the direction ratios of the normal to the plane., x, y z, (iii), Equation of a plane if its intercepts on the co-ordinate axes are x1 , y1 , z1 is x + y + z = 1 ., 1, 1, 1, (iv), Equation of a plane if the length of the perpendicular from the origin on the plane is p and d.c's of the, perpendicular as l , m, , n is, lx+my+nz=p, (v), Parallel and perpendicular planes – Two planes a1 x + b1 y + c1z + d1 = 0 and a2x + b2y + c2z + d2 = 0, are perpendicular if a1 a2 + b1 b2 + c1 c2 = 0, , N, , � � � �, Four points A, B, C, D with position vectors a ,b,c,d respectively are coplanar if and only if there exist, � �, �, �, scalars x, y, z, w not all zero simultaneously such that xa+ yb+zc+wd =0 where, x + y + z + w = 0., RECIPROCAL SYSTEM OF VECTORS :, � � �, � � �, � � � � � �, If a ,b,c & a' ,b ' ,c ' are two sets of non coplanar vectors such that a .a'=b .b '=c .c '=1 then the two, , AI, , 15., , COPLANARITY OF VECTORS :, , Section Fomula, m 2 z1 + m1 z 2, m 2 x1 + m1 x 2, m 2 y1 + m1 y 2, x=, ; y=, ; z=, m1 + m 2, m1 + m 2, m1 + m 2, ( For external division take –ve sign ), Direction Cosine and direction ratio's of a line, Direction cosine of a line has the same meaning as d.c's of a vector., Any three numbers a, b, c proportional to the direction cosines are called the direction ratios i.e., l, m n, 1, =, = =±, a, b, c, a 2 + b 2 + c2, same sign either +ve or –ve should be taken through out., note that d.r's of a line joining x1 , y1 , z1 and x2 , y2 , z2 are proportional to x2 – x1 , y2 – y1 and z2 – z1, If θ is the angle between the two lines whose d.c's are l1 , m1 , n1 and l2 , m2 , n2, cosθ = l1 l2 + m1 m2+n1 n2 hence if lines are perpendicular then l1 l2 + m1m2+ n1 n2 = 0, l1 m1 n1, =, =, if lines are parallel then, l2 m 2 n 2, , .IN, FO, , � � �, [ a , b, c ] ≠ 0 , then the vectors are linearly independent., , 14., , ( x 2 − x1 ) 2 + ( y 2 − y1 ) 2 + (z 2 − z1 ) 2, , d=, , parallel if, , (vi), , a1 b1 c1, = =, a 2 b2 c2, , and, , coincident if, , a1 b1 c1 d1, = = =, a 2 b2 c2 d2, , Angle between a plane and a line is the compliment of the angle between the normal to the plane and the, � �, �, � �, Line : �r =� a + λ b then cos(90 − θ) = sin θ = �b . n, � ., line . If Plane : r . n = d , | b | .| n |, , where θ is the angle between the line and normal to the plane., , (vii), , Length of the perpendicular from a point (x1 , y1 , z1) to a plane ax + by + cz + d = 0 is, p=, , (viii), , ax1 + by1 + cz1 + d, a 2 + b2 + c2, , Distance between two parallel planes ax + by + cz + d1 = 0 and ax+by + cz + d2 = 0 is, , d1 − d 2, a + b2 + c2, 2, , (ix), , Planes bisecting the angle between two planes, , a1x + b1y + c1z + d1 = 0 and a2 + b2y + c2z + d2 = 0 is
Page 40 :
10., , tanα + tanβ, cosecα + cosecβ occurs when α = β = σ/2., (f), If A, B, C are the angles of a triangle then maximum value of, sinA + sinB + sinC and sinA sinB sinC occurs when A = B = C = 600, (g), In case a quadratic in sinθ or cosθ is given then the maximum or minimum values can be interpreted, by making a perfect square., Sum of sines or cosines of n angles,, , (, , ), , sin α + sin (α + β) + sin (α + 2β ) + ...... + sin α + n − 1 β =, , (, , ), , nβ, 2, β, sin 2, , sin, , cos α + cos (α + β) + cos (α + 2β ) + ...... + cos α + n − 1 β =, , nβ, 2, sin β2, , n−1 , β, cos α+, 2 , , , 23. TRIGONO-2 (TRIGONOMETRIC EQUATIONS, & INEQUATIONS), , 1, x, , , Consider the examples : log 2 sin < – 1 ; sin x cos x + < 0 ;, 2, 2, , , , I., , SINE FORMULA :, , In any triangle ABC ,, , II., , COSINE FORMULA :, , (i) cos A =, , π π, ,n∈I ., 2 , , III., , 3., , If tan θ = tan α ⇒ θ = n π + α where α ∈ − π , π , n ∈ I ., , V., , 3 cos² x − 10 cos x + 3 = 0 and 2 sin2x + 3 sinx + 1 = 0, Solving equations by introducing an Auxilliary argument . Consider the equation : sin x +, , M, , (c), , AI, , If sin² θ = sin² α ⇒ θ = n π ± α., cos² θ = cos² α ⇒ θ = n π ± α., tan² θ = tan² α ⇒ θ = n π ± α., [ Note : α is called the principal angle ], TYPES OF TRIGONOMETRIC EQUATIONS :, (a), Solutions of equations by factorising . Consider the equation ;, (2 sin x − cos x) (1 + cos x) = sin² x ; cotx – cosx = 1 – cotx cosx, (b), Solutions of equations reducible to quadratic equations. Consider the equation, , N, , 2, , 2 ; 3 cos x + sin x = 2 ; secx – 1 = ( 2 – 1) tanx, (d), Solving equations by Transforming a sum of Trigonometric functions into a product., Consider the example : cos 3 x + sin 2 x − sin 4 x = 0 ;, sin2x + sin22x + sin23x + sin24x = 2 ; sinx + sin5x = sin2x + sin4x, (e), Solving equations by transforming a product of trigonometric functions into a sum. Consider, sin 6 x, the equation :sin 5 x . cos 3 x = sin 6 x .cos 2 x ; 8 cosx cos2x cos4x =, ; sin3θ = 4sinθ sin2θ, sin x, sin4θwww.MathsBySuhag.com , www.TekoClasses.com, (f), Solving equations by a change of variable :, (i), Equations of the form of a . sin x + b . cos x + d = 0 , where a , b & d are real numbers, & a , b ≠ 0 can be solved by changing sin x & cos x into their corresponding tangent of half the, angle. Consider the equation 3 cos x + 4 sin x = 5., (ii), Many equations can be solved by introducing a new variable . eg. the equation sin4 2, 1, x + cos4 2 x = sin 2 x . cos 2 x changes to 2 (y + 1) y − = 0 by substituting , sin 2 x . cos 2 x = y.., 2, (g), Solving equations with the use of the Boundness of the functions sin x & cos x or by, making two perfect squares. Consider the equations :, , cos x =, , JE, E, , 4., 5., 6., 7., , 2, , IV., , n∈I ., , x, x, , , , , sin x cos − 2 sin x + 1+sin −2cosx . cos x = 0 ;, , , 4, 4, , , , sin2x + 2tan2x +, , 4, 11, tanx – sinx +, =0, 3, 12, , b 2 +c 2 −a 2, 2bc, , a, b, c, ., =, =, sin A sin B sin C, , or a² = b² + c² − 2bc. cos A, , c 2 +a 2 −b 2, a 2 + b 2 −c 2, (iii) cos C =, 2ca, 2ab, PROJECTION FORMULA :, (i) a = b cos C + c cos B, (ii) b = c cos A + a cos C, (iii) c = a cos B + b cos A, b−c, A, B−C, =, cot, NAPIER’S ANALOGY − TANGENT RULE :, (i) tan, b +c, 2, 2, c−a, B, C−A, C, A−B a −b, (iii) tan, =, cot, =, cot, (ii) tan, a +b, 2, 2, c+ a, 2, 2, TRIGONOMETRIC FUNCTIONS OF HALF ANGLES :, , .IN, FO, , 2., , If sin θ = sin α ⇒ θ = n π + (−1)n α where α ∈ − ,, 2, If cos θ = cos α ⇒ θ = 2 n π ± α where α ∈ [0 , π] ,, , 5 − 2 sin 2 x ≥ 6 sin x −1, , (ii) cos B =, , THINGS TO REMEMBER :, 1., , TRIGONOMETRIC INEQUALITIES : There is no general rule to solve a Trigonometric inequations, and the same rules of algebra are valid except the domain and range of trigonometric functions should be, kept in mind., , 24. TRIGONO-3(SOLUTIONS OF TRIANGLE), , n−1 , β, sin α+, 2 , , , sin, , 8., , VI., , VII., , Note, , (s−c)(s−a ), C, ; sin =, ca, 2, , (s−a )(s−b), ab, , A, =, 2, , (s−b)(s−c), B, ; sin =, bc, 2, , cos, , A, =, 2, , s(s−a ), B, ; cos =, bc, 2, , (iii), , tan, , A, =, 2, , ∆, (s−b)(s−c), a + b+c, & ∆ = area of triangle., where s =, =, s(s−a ), s(s−a ), 2, , (iv), , Area of triangle =, , (i), , sin, , (ii), , s(s−b), C, ; cos =, ca, 2, , s(s−c), ab, , s(s−a )(s−b)(s−c) ., , M−N, , RULE : In any triangle ,, (m + n) cot θ = m cot α − n cot β, = n cot B − m cot C, 1, 2, , ab sin C =, , 1, 2, , bc sin A =, , 1, 2, , ca sin B = area of triangle ABC ., , a, b, c, = 2R, =, =, sin A sin B sin C, a bc, that R = 4 ∆ ; Where, , R is the radius of circumcircle & ∆ is area of, trianglewww.MathsBySuhag.com , www.TekoClasses.com, , VIII. Radius of the incircle ‘r’ is given by :, ∆, a +b+c, where s =, 2, s, C, tan, 2, a sin B2 sin C2, (c) r =, & so on, cos A2, , (a) r =, , (b) r = (s − a) tan, , (d) r = 4R sin, , A, 2, , = (s − b) tan, , Radius of the Ex− circles r1 , r2 & r3 are given by :, , (a), , r1 =, , (b), , = (s − c), , B, A, C, sin sin, 2, 2, 2, , IX., , ∆, ∆, ∆, ; r3 =, ; r2 =, s−c, s−b, s−a, , B, 2, , r1 = s tan, , C, B, A, ; r2 = s tan ; r3 = s tan, 2, 2, 2
Page 41 :
a cos B2 cos C2, cos A2, , r2 = 4 R sin, , B, 2, , . cos, , & so on (d), A, 2, , . cos, , C, 2, , ;, , r1 = 4 R sin, , A, 2, , . cos, , C, 2, , . cos, , r3 = 4 R sin, , B, 2, , . cos, , A, 2, , C, 2, , . cos, , Kinetic and potential energy; Work and power; Conservation of linear momentum and mechanical energy., Systems of particles; Centre of mass and its motion; Impulse; Elastic and inelastic collisions.?, Law of gravitation; Gravitational potential and field; Acceleration due to gravity; Motion of planets and, , ;, , B, 2, , X.LENGTH OF ANGLE BISECTOR & MEDIANS :If ma and βa are the, lengths of a median and, an angle bisector from the angle A then,, , ma =, , 1, 2, , 2 b2 + 2 c2 − a 2, , 2 bc cos A, 2, and βa =, b+c, , Note that m2a + m 2b + m2c =, , 3 2, (a + b2 + c2), 4, , XI., , ORTHOCENTRE AND PEDAL TRIANGLE :The triangle KLM which is formed by joining the feet of the, altitudes is called the pedal triangle.−the distances of the orthocentre from the angular points of the∆ ABC, are 2 R cosA , 2 R cosB and 2 R cos−, the distances of P from sides are 2 R cosB cosC,, 2 R, cosC cosA and 2 R cosA cosB−, the sides of the pedal triangle are a cosA (= R sin 2A),, b cosB (= R sin 2B) and c cosC (= R sin 2C) and its angles areπ − 2A, π − 2B and π − 2C., −, circumradii of the triangles PBC, PCA, PAB and ABC are equal ., XII EXCENTRAL TRIANGLE :The triangle formed by joining the three excentres I1, I2 and I3, of ∆ ABC is called the excentral or excentric triangle., Note that :− Incentre I of ∆ ABC is the orthocentre of the excentral ∆ I1I2I3 ., −, ∆ ABC is the pedal triangle of the ∆ I1I2I3 .− the sides of the excentral triangle are, A, C, B, π A, π B, and π − C ., 4 R cos , 4 R cos and 4 R cos, ,, and its angles are, −, −, 2, 2, 2, 2 2, 2 2, 2 2, I I1 = 4 R sin, , C, B, A, ; I I2 = 4 R sin ; I I3 = 4 R sin ., 2, 2, 2, , N, , −, , AI, , XIII. THE DISTANCES BETWEEN THE SPECIAL POINTS :www.MathsBySuhag.com , www.TekoClasses.com, (a), The distance between circumcentre and orthocentre is = R . 1 − 8 cos A cos B cos C, R2 − 2 R r, , The distance between circumcentre and incentre is =, , (c), XIV., , The distance between incentre and orthocentre is 2 r 2 − 4 R 2 cos A cos B cos C, Perimeter (P) and area (A) of a regular polygon of n sides inscribed in a circle of radius r are given by P, 1, π, 2π, Perimeter and area of a regular polygon of n sides circumscribed about, and A = nr2 sin, = 2nr sin, 2, n, n, π, π, a given circle of radius r is given by P = 2nr tan, and, A = nr2 tan, n, n, In many kinds of trignometric calculation, as in the solution of triangles, we often require the logarithms, of trignometrical ratios . To avoid the trouble and inconvenience of printing the proper sign to the logarithms, of the trignometric functions, the logarithms as tabulated are not the true logarithms, but the true logarithms, increased by 10 . The symbol L is used to denote these "tabular logarithms" . Thus :, L sin 15º 25′ = 10 + log10 sin 15º 25′ and, L tan 48º 23′ = 10 + log10 tan 48º 23′, , JE, E, , M, , (b), , XV., , satellites in circular orbits; Escape velocity., Rigid body, moment of inertia, parallel and perpendicular axes theorems, moment of inertia of uniform bodies, with simple geometrical shapes; Angular momentum; Torque; Conservation of angular momentum; Dynamics, of rigid bodies with fixed axis of rotation; Rolling without slipping of rings, cylinders and spheres; Equilibrium, of rigid bodies; Collision of point masses with rigid bodies., Linear and angular simple harmonic motions., Hooke?s law, Young?s modulus., Pressure in a fluid; Pascal?s law; Buoyancy; Surface energy and surface tension, capillary rise; Viscosity, (Poiseuille?s equation excluded), Stoke?s law; Terminal velocity, Streamline flow, equation of continuity,, Bernoulli?s theorem and its applications., Wave motion (plane waves only), longitudinal and transverse waves, superposition of waves; Progressive and, stationary waves; Vibration of strings and air columns;Resonance; Beats; Speed of sound in gases; Doppler, effect (in sound).www.MathsBySuhag.com , www.TekoClasses.com, Thermal physics: Thermal expansion of solids, liquids and gases; Calorimetry, latent heat; Heat conduction in, one dimension; Elementary concepts of convection and radiation; Newton?s law of cooling; Ideal gas laws;, Specific heats (Cv and Cp for monoatomic and diatomic gases); Isothermal and adiabatic processes, bulk, modulus of gases; Equivalence of heat and work; First law of thermodynamics and its applications (only for, ideal gases);? Blackbody radiation: absorptive and emissive powers; Kirchhoff?s law; Wien?s displacement, law, Stefan?s law., Electricity and magnetism: Coulomb?s law; Electric field and potential; Electrical potential energy of a, system of point charges and of electrical dipoles in a uniform electrostatic field; Electric field lines; Flux of, electric field; Gauss?s law and its application in simple cases, such as, to find field due to infinitely long, straight wire, uniformly charged infinite plane sheet and uniformly charged thin spherical shell., Capacitance; Parallel plate capacitor with and without dielectrics; Capacitors in series and parallel; Energy, stored in a capacitor., Electric current; Ohm?s law; Series and parallel arrangements of resistances and cells; Kirchhoff?s laws and, simple applications; Heating effect of current., Biot'Savart's law and Ampere?s law; Magnetic field near a current-carrying straight wire, along the axis of a, circular coil and inside a long straight solenoid; Force on a moving charge and on a current-carrying wire in a, uniform magnetic field., Magnetic moment of a current loop; Effect of a uniform magnetic field on a current loop; Moving coil, galvanometer, voltmeter, ammeter and their conversions., Electromagnetic induction: Faraday?s law, Lenz?s law; Self and mutual inductance; RC, LR and LC circuits, with D.C. and A.C. sources., Optics: Rectilinear propagation of light; Reflection and refraction at plane and spherical surfaces; Total internal, reflection; Deviation and dispersion of light by a prism; Thin lenses; Combinations of mirrors and thin lenses;, Magnification.?, Wave nature of light: Huygen?s principle, interference limited to Young?s double-slit experiment., Modern physics: Atomic nucleus; Alpha, beta and gamma radiations; Law of radioactive decay;? Decay, constant; Half-life and mean life; Binding energy and its calculation; Fission and fusion processes; Energy, calculation in these processes., Photoelectric effect; Bohr?s theory of hydrogen-like atoms; Characteristic and continuous X-rays, Moseley?s, law; de Broglie wavelength of matter waves., , .IN, FO, , (c)r1 =, , IIT JEE ADVANCED Physics Syllabus, General: Units and dimensions, dimensional analysis; least count, significant figures; Methods of, measurement and error analysis for physical quantities pertaining to the following experiments: Experiments, based on using Vernier calipers and screw gauge (micrometer), Determination of g using simple pendulum,, Young?s modulus by Searle?s method, Specific heat of a liquid using calorimeter, focal length of a concave, mirror and a convex lens using u-v method, Speed of sound using resonance column, Verification of Ohm?s, law using voltmeter and ammeter, and specific resistance of the material of a wire using meter bridge and post, office box., Mechanics: Kinematics in one and two dimensions (Cartesian coordinates only), projectiles; Uniform Circular, motion; Relative velocity., Newton's laws of motion; Inertial and uniformly accelerated frames of reference; Static and dynamic friction;
 Learn better on this topic
Learn better on this topic