Page 1 :
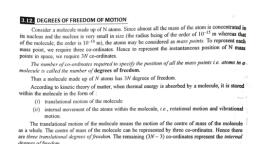
we always neglect the deformations that occur in actual bodies. In order to discuss the mechanics, The various methods, the one having the merit over the other, of solving mechanical problems, n the application of those methods to solve the particular type of problems. Chapter fourth is on, oscillations. The present chapter is about the motion of a particular type of body-the rigid body., provide introductory material for the present chapter. Chapter eighth deals with small, required to describe its motion will be much less than 3N., of a rigid body, we must have means of describing its position and orientation. A rigid body with N, KIGID BODIES-KINEMATICS AND DYNAMICS, involving particles have been discussed upto third chapter. After that chapter, the onus has been, the problem of motion of bodies moving under central force. Chapter fifth has been written to, on, By a rigid body we mean a rigid assembly of particles, with fixed inter-particle distances. ThuS, a, we, particles, can at most have 3N degrees of freedom, three for each constituent particle but because, che large number of constraints, the number of degrees of freedom or independent co-ordinates, 6.1. GENERALISED CO-ORDINATES FOR RIGID BODY MOTION, ) Consider three non-collinear points p, q and r (fig. 6.1) in a rigid body. Each particle has, three degrees of freedom and so a total of nine degrees of freedom is required. But due to the, presence of constraints, the interparticle distance is fixed. Consequently, there will be three, equations of constraints between them, viz., Spg = (x1 – x2)² + (yı – y2)² + (z1 – z2)? = constant, pq, S, = (x2 – x3)² + (y2 – y3)² + (z2 – 23)² = constant, %3D, |, qr, S, = (x3 – x1)² + (y3 – y1)² + (z3 – 21)² = constant., %3D, rp, Hence the total number of degrees of freedom of this system of three non-collinear particles is, reduced to (9 – 3) = 6. The position of any further particle, say P, requires three co-ordinates but, there will be three equations of constraints for this particle (because distance of P from p, q and r, is fixed). Thus, for P, three co-ordinates minus three constraints amounts to zero degrees of, freedom. That is, any other particle, apart from p, q and r,taken to specify the configuration of the, nigid body, will not add any new degrees of freedom, Thus the configuration of the body would be, Completely specified by p, q andr particles i.e. by six degrees of freedom., |, (r(x3,y3,Z3), q(x2.y2.Z2), p(x1,Y1,Z1), .y, Flg. 6.1, (309), Scanned by TapScanner
Page 2 :
taken coincident with the centre of mass of the body, is given three cartesian co-ordinates r, to the co-ordinate axes of the external space. The remaining three co-ordinates then specify, orientation of the body relative to the external frame of reference. Orientation of the body can, described elegantly by locating a cartesian set of co-ordinates fixed in the rigid body (hereah, (ii) We can also give an alternative way of showing that six generalised co-ordinates (de, co-ordinates, a fixed point in the body, which registers its translation and may with advantage, of freedom) are required to fix the configuration of the body. For assigning generali, CLASSICAL MECHANG, CLASSICAL MECHANG, 310, (11) We can also give an alternative way of showing that six generalised co-ordinat, of freedom) are required to fix the configuration of the body. For assigning deg, a, to the co-ordinate axes of the external space. The remaining three co-ordinates then srelat, denoted by primed axes as shown in fig. 6.2) called body set of axes., z', z', k, y', k', j', i, -y, x', y, i', X, (b), (a), xyz-space or external set of axes, x'y'z'-body set of axes (fixed with in the body), Fig. 6.2, Thus configuration of a rigid body with respect to some cartesian co-ordinate system in space, (space set axes x, y, z) arbitrarily chosen is determined completely if the position of the origin and, orientation of a cartesian co-ordinate system fixed in the body (body set of axes x', y', z')is known., To fix origin of co-ordinates, one can easily assign three co-ordinates which also register, translation of the body. For specifying orientation of the body set of axes, one may take help of the, direction cosines of body set of axes (primed system) referred to space set of axes (unprimet, system)., Let a;, B;, Yi be the direction cosines and i, j, k and i', i, k' be the unit vectors along the, axes x y z fixed in space and x', y', z' axes fixed in the body respectively. Then, + Bij + Yık, i' =aj i +Bjj+ Yık, j =azi +ß2j+ Y2k, k' =a3i +ß3j+ Y3k, Therefore we get, i'.i' = 1= a} + B?, j.j = 1 = a + B% +, k.K = 1= a +B +, i'.i' = 1 =, 2, 2,, .2, +Y, 2, Angle made by, Angle with, i', k', i, a2, a3, j, B2, B3, k -, Y2, Y3, Scanned by TapScanner, 212223
Page 3 :
matrix A i.e. its eigenvalues a, and the corresponding eigenvectors R are found, then the Euler's, terms of these direction cosines., be R, then the transformed vector R' must be identical with R:, magnitude of a vector does not change, only its direction may undergo a change; the problem,, magnitude of the vectors remains unchanged., therefore, reduces to finding the rotation axis-such that the distance of the particles of the rigid, body from this axis remains the same during rotation., them are left unconnected. But these three unconnected direction cosines are not independent of, each other, and therefore we can not use them as degrees of freedom or generalised co-ordinates, As amongst nine direction cosines there are six relations connecting them, on!y three out of, This equation is of the form, theorem is proved., | DATE., n BODIES-KINEMATICS AND DYNAMICS, 311, and, i'.j' = 0 = aja2 + BIß2 + Y1Y2, j'.k' = 0 = a2a 3 + B2B3 + Y2Y3, k'.i' = 0 = a3a, +B3ß1 + Y3Y1, %3D, %3D, As amongst nine direction cosines there are six relations connecting them, on!y three out of, n are left unconnected. But these three unconnected direction cosines are not independent of, ch other, and therefore we can not use them as degrees of freedom or generalised co-ordinates, nd consequently, we can not set up a Lagrangian in order to describe the rotation of the system in, of these direction cosines., terms, In fact, when we generate the primed axes (body set of axes) from the unprimed axes (space set, of axes) through three successive rotations, the so-called Euler angles, then each transformation, Irotation) is an orthogonal transformation and final configuration of primed axes will be shown to, result from a composite orthogonal transformation., The most useful set of generalised co-ordinates for a rigid body are Euler angles, which are the, engles of rotation about specified axes, executed in a specific sequence., 6.2. EULER'S THEOREM :, A rigid body can have two independent motions : a translational motion and a rotational, motion. Therefore such a body in motion can be completely specified if its position and orientation, are given. Three coordinates are needed to locate some point within the body on the instantaneous, axis of rotation and remaining three will finally specify the orientation of the rigid body. Thus out, of these six degrees of freedom, three degrees of freedom represent the translational motion of the, body whereas the other three describe its rotational motion., Above conclusion is in confirmity with the Euler's theorem on rigid body motion which we, state below. Its proof then follows., Euler's Theorem :, The general displacement of a rigid body with one point fixed is a rotation about some axis., As one point of the body is fixed, and we take it as the origin of the body set of axes-then the, body cannot have any translational motion. Hence according to above theorem, we can always, obtain the body set of axes by means of a single rotation of the initial set of axes which may be, CO-incident with the space set of axes at the initial time. Since we know that in a rotation, the, therefore, reduces to finding the rotation axis-such that the distance of the particles of the rigid, From above it appears that any vector lying along the axis of rotation must have the same, Components in the initial as well as in the new set of axes obtained upon rotation, and the, Let the rotation be brought about by a matrix A and if such a vector along the axis of rotation, ... (1), R' = AR = R, ... (2), (1 = 1), eigenvalue eguation, where 1 is a constant. If we are able to solve the equation for the, theo A i.e. its eigenvalues 2, and the corresponding eigenvectors R are found, then the Euler's, AR = AR,, called, an, Scanned by TapScanner, an es
Page 4 :
2. As time progresses, the orientation of the body will change and the matrix of, 3. Further, the matrix A (t) must correspond to a proper rotation, i.e., it's determinant must, be equal to +1; we also know that the determinant of the transpose of A = A will also be equal to +1;, k = 1, 2, 3 For each of these eigenvalues, we can solve eq. (3) to find the corresponding eigenvectors, ANIC, 312, Now eq. (2) can also be written as, (A- Al) R = 0, |A-All = 0, %3D, a13, d11-A, d12, = 0, a23, a21, a22-A, a32, a33-A, This is a cubic equation in À and its roots are 1, 12, 13 which we denote by 1, k = 1, 2, 3 For each of these eigenvalues, we can solve eq. (3) to find the corresponding eigenvere, (X11, a31, R1, R2, R3. The set of equations for A1 is, a12, a13, a11-A1, X12 = 0,, %3D, a21, a22-A1, a23, X13, a31, a32, a33-A1, where X11, X12, X13 are the three components of the first eigenvector R1. Similar equations canb, written for R2 with components X21, X22, X23 and for R3 with components X 31, X 32, X33. Thes, all equations together in matrix form are, AX = XA, .. 5), %3D, X11 X12 X13, Х 22 Х23, X 31 X 32 X33, where, X-X 21, %3D, 0 22, 0 23, and, A =, 0., Multiply eq. (5) on the left by X to obtain, X AX = A, .. (6), %3D, As already indicated A here is a diagonal matrix whose diagonal elements are the eigenvalues, 21, 22, 13 of the matrix A Eq. (6) then represents the diagonalisation of the matrix through, similarity transformation. The matrix X that diagonalises A has along its columns the eigenvectors, of A and the elements of the diagonalised form of A are the corresponding eigenvalues., Now, in order to represent a rigid rotation, the matrix A that performs this rotation has the, following properties (cf. sec. 5.7), 1. It must an be an orthogonal matrix, since an orthogonal matrix leaves the magnitude of, any vector unchanged:, Ã = A-1, (7), 2. As time progresses, the orientation of the body will change and the matrix, transformation will be a function of time; A= A (t); and since the transformation must, continuous it must evolve continuously from the identity transformation., .., |A= A= +1, %3D, (8), ..., Scanned by TapScanner
Page 5 :
Now consider the expression, o RODIES-KINEMATICS AND DYNAMICS, i.e, the determinant of the matrix (A - 1) is the same as the determinant of its negative. If n is the, order of the square matrix, then this means, be +1. This completes the proof the Euler's theorem., 313, (A – I) Ã = 1 - Ã, |(A – 1) A| = |A - |||ÃI, %3D, then,, = || - A|, |A-1= |1-A|=|-(A-1)|, he determinant of the matrix (A – 1) is the same as the determinant of its negative. If n is the, i.l..f the square matrix, then this means, (9), |A - || = |- (A –- I) | = (- 1)" |A - ||, In three dimensional space, n = 3 and hence eq. (10) can be satisfied only when, ... (10), |A - || = 0., %3D, Comparing this with the secular equation (4), it is evident that one of eigenvalues À must, 1. This completes the proof the Euler's theorem., It also follows from the properties of similarity transformation that, . (11), |A'| = |X AX| = | A| = 1 1 ^ 2 ^ 3, 1, If 13 = + 1, then, 11^2 = 1., %3D, An immediate extension of the Euler's theorem is the Chasles' theorem :, Chasles' Theorem, The most general displacement of a rigid body is a translation plus a rotation about some axis., The two theorems have their general validity and form the fundamental theorems of the rigid, body motion. The form of Chasles' theorem makes one think that it might be possible to divide the, problem of rigid body motion into two parts-one part dealing with the translational motion, and, the other part being concerned solely with the rotational motion. Actually we use this fact while, determining the degrees of freedom or number of independent coordinates of a rigid body. If one, point of the body is held fixed, the division is automatic, because then there is only the rotational, motion possible about the fixed point. However, a separation of the problem into translational and, rotational part is often possible even for the general case., EULER'S ANGLES., Let us proceed to find three independent parameters which would completely specify the, orientation of rigid body-the so called Euler's angles., Let x, y, z be the orthogonal space set of axes with i, j and k as unit vectors along these axes., Also x' , y' , z' be the orthogonal body set of axes with i', j' and k’ unit vectors along these axés. As, Body x'y' plane, y', z', X', y, Space, xy plane, Line of Nodes, Fig. 6.3. Note that plane x'-y' is different from plane x-y. Also plane y-z' is different from plane y-z., Scanned by TapScanner